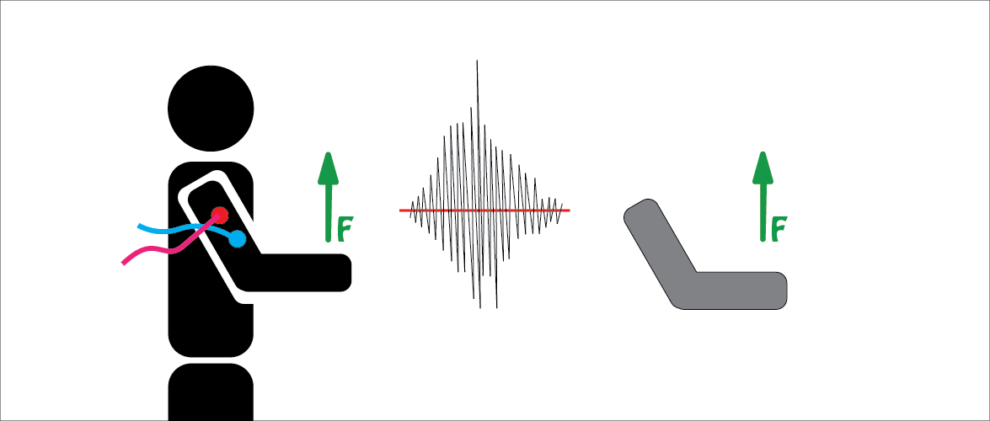
Have you ever wondered how electromyography (EMG) could be used to control or test exoskeleton devices? Or have you ever mused about the origins of passive back support exoskeletons? If you said “yes” to either question, then Michael Wehner has the research paper for you: Man to Machine, Applications in Electromyography, 2012. Don’t let the date fool you. When this research paper was written, it was years ahead of its time, and it is entirely relevant today.
In Man to Machine, Application in Electromyography the use of electromyography for exoskeletons is broken down into five categories:
- Sense, interpret/amplify
- Sense and interpret proportionally
- Sense and interpret threshold
- Monitor to design
- Monitor to evaluate
The paper also has sections on:
- What is electromyography
- Standards
- Sensor types and best practices
- Applications
- Overview of early R&D lift-assist devices: HappyBack, BNDR, PLAD, GRIPSystem
- Teleoperation
- Powered prosthetics
So without further ado, head over to INTECH’s website to view the full paper: http://cdn.intechweb.org/pdfs/25871.pdf
INTECH is a Science, Technology and Medicine open access publisher. Their motto reads: “Publish, read and share novel research.” They have numerous other research papers on exoskeleton technology. Visit their site: http://www.intechopen.com
Electromyography is already being used to control exoskeletons such as the ones made by CYBERDYNE and Gogoa. It is also used to evaluate exoskeletons. For example, the Ekso GT and Laevo have both gone through evaluation studies that monitor the EMG signal from target muscle groups with and without or before and after the use of the exoskeleton. EMG is going to play an increasingly larger role in controlling and evaluating exoskeletons.
Passive exoskeletons for back support and safety such as the Laevo by Laevo and MAX by SuitX/US Bionics are starting to gain renown. It turns out that as revolutionary as they seem, they have deep roots in university research labs.
About the author:
Michael Wehner is a researcher at Harvard University. He has a Ph.D. in Mechanical Engineering from UC Berkeley with Professor Kazerooni as his advisor. Dr. Wehner has held various advisory and leadership mechanical engineering positions since 1993.
Regarding exoskeleton technology, Michael Wehner has been an author for several other papers such as:
- Lower Extremity Exoskeleton Reduces Back Forces in Lifting, Michael Wehner, David Rempel, Homayoon Kazerooni, UC Berkeley, 2009, Conference Paper
- Experimental characterization of components for active soft orthotics, Michael Wehner, Yong-Lae Park, Conor Walsh, Eugene C. Goldfield, June 2012, Conference Paper
- Pneumatic Energy Sources for Autonomous and Wearable Soft Robotics, Michael Wehner, Michael Tolley, Yiğit Mengüç, Yong-Lae Park, Annan Mozeika, Ye Ding, C.D. Onal, Robert F. Shepherd, George M. Whitesides, Robert J. Wood, 2014
Unfortunately, after 2014 the trail of exoskeleton related research by Dr. Wehner goes cold. Hopefully, he is still working on wearable robotics.
Sources:
Michael Wehner (2012). Man to Machine, Applications in Electromyography, EMG Methods for Evaluating Muscle and Nerve Function, Mr. Mark Schwartz (Ed.), ISBN: 978-953-307-793-2, InTech, Available from: http://www.intechopen.com/books/emg-methods-for-evaluating-muscle-and-nerve-function/man-to-machine- applications-in-electromyography
Research Gate, Michael Wehner, Harvard School of Engineering and Applied Sciences, London, United Kingdom, Contribution, https://www.researchgate.net/profile/Michael_Wehner2/publications
Acknowledgements:
Special thanks to Robert B. Dick, Ph.D, Captain USPHS (Ret.) for bringing earlier R&D back support exoskeletons to my attention.
https://micro.seas.harvard.edu/papers/Wehner_ICRA13.pdf
Thank you for sharing A Lightweight Soft Exosuit for Gait Assistance, 2013. What became of this project? Was this the inspiration for the Wyss soft exosuits?