
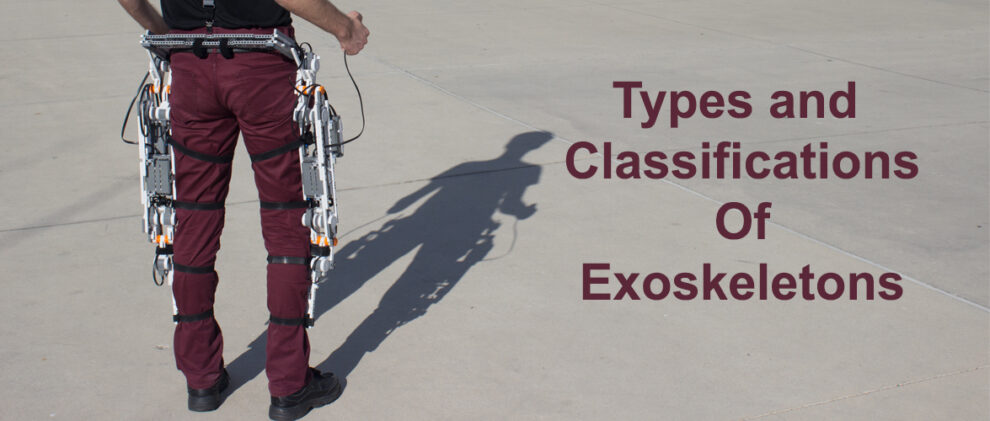
Exoskeleton systems can be divided into many different categories, types or classifications based on a series of questions:
- What body parts are actuated or powered by the wearable device?
- full body
- upper extremities: arms and torso
- further broken down into specific areas: some exoskeletons can concentrate on the wrist and fingers, while others focus on the shoulder and elbow joints
- lower extremities: legs
- further broken down into: hip, knee, or ankle only, hip-knee, hip-ankle, knee-ankle or hip-knee-ankle. The motion can also be in more than one plane of rotation.
- Is it powered?
- powered exoskeletons use batteries or electric cable connections to run sensors and actuators
- static exoskeletons: the actuators need to be turned on at all times in order for the device to maintain its shape.
- dynamic exoskeletons: actuators do not need to be turned on at all times and the device can be many times more energy efficient. This type of exoskeletons are further differentiated by what they are designed to do.
- passive exoskeletons do not have any electrical power source and can be used for:
- weight re-distribution: springs and locking mechanisms divert the weight of an object around the user and into the ground
- energy capture: ankle spring-clutch exoskeletons have been shown to improve walking efficiency, while spring-dynamo knee exoskeletons can be used to charge a battery.
- dampening: some spring or spring-damper passive exoskeletons have been designed as shock absorbers (high-speed skiing – Ski Mojo) or vibration reducers (small high-speed boat – Marine Mojo)
- locking: some passive exoskeletons are designed to be unobtrusive until they are locked into place, allowing the user to sit or crouch in the same position for a prolonged period of time.
- pseudo-passive exoskeletons have batteries, sensors, and other electronics, but they are not used to provide actuation.
- The best example of a pseudo-passive exoskeleton is the C-Brace by Ottobock, which uses its electronics to control a variable damper in the knee. The C-Brace alternatively unlocks, slows down the swing of the leg and locks depending on the position of the leg in the gait cycle as determined by the integrated sensors.
- hybrid-exoskeletons are wearables that have all of the controllers and sensors of a powered exoskeleton but use FES (functional electrical stimulation) of the muscles as actuators.
- powered exoskeletons use batteries or electric cable connections to run sensors and actuators
- Is it mobile?
- fixed: the device is tethered, attached to a wall, a bracket or suspended from the air by a fixed hook and harness
- supported: the exoskeleton is attached to an overhead rail, is supported by a moving frame or in some cases, supported by an adjacent wheeled robot. These configurations allow for the heavy motors, controllers and batteries to be externally supported while still granting mobility to exoskeleton wearer.
- mobile: the user and exoskeleton can move around freely.
- How is it controlled (user-machine-interface)?
- joystick: reserved for exoskeletons that provide 100% of the energy for motion needed by the wearer.
- buttons or control panels: the exoskeleton is placed in different pre-programmed modes. The control surface does not have to be on the exoskeleton, previous designs have them on a wrist strap, integrated into walking aids such as crutches or held by a supervisor adjacent to the user.
- mind-controlled: using an electrode skull cap
- sensors: current exoskeletons designs can have as many as 40 different integrated sensors that monitor rotation, torque, tilt, pressure and can capture nerve signals in the arms and legs
- no control: some passive exoskeletons have no control buttons or switches.
- How is it built?
- rigid materials such as metals or carbon fiber.
- flexible materials in the entire construction (soft exoskeleton or exosuit).
- Origin?
- home built (DIY) – some of the biggest companies today started out in garages
- research labs (academia)
- commercial companies (industry)
- governments – currently only the Chinese government is actively developing an exoskeleton. All other governments may provide grants, but are looking to buy a working model.
Another way to differentiate exoskeletons is according to what they are designed to do, which is the basis of the Commerical Exoskeletons Catalog.
Updated March 22nd, 2017
Added Pseudo-Passive Exoskeletons and Hybrid Exoskeletons to “Is it powered?”







Hi,
how can I classify an Industrial exoskeleton by thinking it will reduce worker muscular fatigue and risks of missing work? It can be classified as an Individual Protection Equipment?
Hello, I think Personal Protective Equipment or PPE is more common. However, a device has to earn that title. As of yet, no industrial exoskeleton has been designated as PPE, but that could change soon so stay tuned for updates.
Hi,
Could you give me the references you checked to write this article?
Hi Joaquin, these “rules” are unique to the Exoskeleton Report and our framework for handling exoskeleton information coming from all around the world. The closest official reference is the terminology standard by ASTM Committee F48.