


Description
The Honda Walking Assist Device (Stride Manager) builds on the company’s experience with walking robots (example ASIMO). The Walking Assist Device has been in research since 1999.
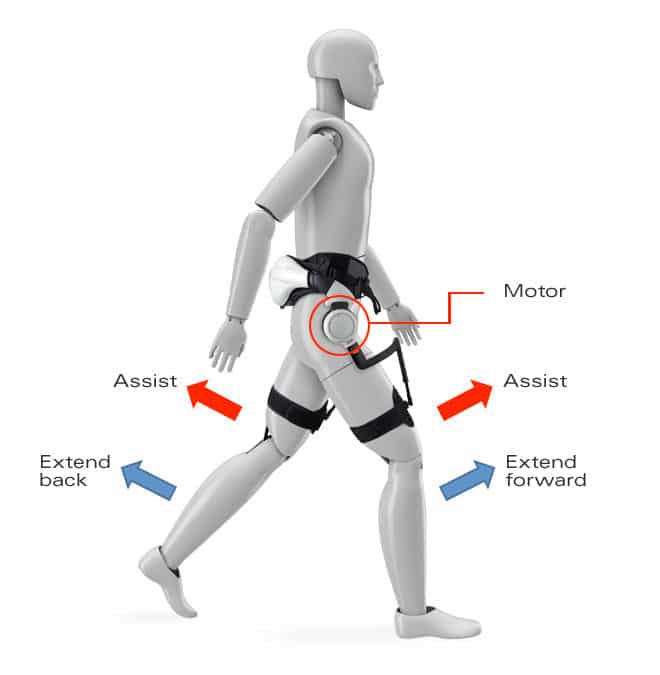
This exo is based on the inverted pendulum model, which is a theory of bipedal walking and is designed as a device to be used in the training of walking. The onboard controller activates motors based on data obtained from hip angle sensors. The main goal is to improve the symmetry of the timing of each leg lifting from the ground and extending forward. It also promotes a longer stride for easier walking.
The Honda wearable robot weights 2.7 kg (6 lb). It is built using proprietary motors and control system. It is a minimalistic design attached to the body with simple straps. The device is made to be highly adaptable to various body sizes.
Honda, Minato, Tokyo, Japan, website
Exoskeleton Report does not endorse one exoskeleton product over another. The exoskeleton catalog is purely for educational purposes. The catalog is meant to provide an easily accessible birds-eye view of the exoskeleton industry, and a quick method to sort exoskeletons by type and purpose. All prices are approximate and are meant to provide a general sense of the cost of the devices.




Cecília Eloy Neves –
How can I buy one of this?
Bobby Marinov –
To the best of our team’s knowledge, the Honda Walking Assist is not available for purchase or rent in the US yet.
Kiran –
Is it available in India ? Would you be able to ship it to India ?
Bobby Marinov –
Hello. Please contact the appropriate manufacturer of the exoskeleton system that interests you directly.
Adam –
Hello…. I want to buy it for my mom …. i live in Holland
From where can I. Buy it???
Bobby Marinov –
The device recently won the CE mark of approval, please reach out to the manufacturer, Honda for more information.
Ankit Mishra –
Hello…i am Ankit from India I have been unable to walk in last 3 years Does this device help to walk ….. My both legs are very much spastic- so please inform that
Bobby Marinov –
Dear Ankit, yes this device is designed to help with walking. For more detailed information, please contact the manufacturer, Honda. Honda – India contact information can be found here: https://www.hondacarindia.com/contact-us, though most likely they will send you to the Japanese headquarters for wearable robotics questions.
Michelle –
can I buy this product in Canada?
Bobby Marinov –
At the moment, no. At least not to our knowledge. Please reach out to Honda directly for more up to date information on the subject.
Glenn Ozburn –
I see that this assist has motors on each side of the hip. What is the primary energy source for these motors and where are they located? If it is batteries, is this rechargeable or do you have to replace batteries and how often? Thanks
Anantha Mahendran –
Hi, I am trying to purchase this product for use in India. When I try to contact Honda cars India contact number they donot hold any information on this product. Is there a way you could suggest to get in touch with the manufacturers. Any suggestions on the price
Bobby Marinov –
Hi Anantha, I am sorry that you have trouble getting to the manufacturer. Right now we can’t help with either question but stay tuned.
Daniel Rojas –
Hello, do you guys maybe have an idea when will it be available in the US?
Bobby Marinov –
Unfortunately, we don’t know when this product will be made available in the US.
Michael –
Is it available in Greece or Europe?
Bobby Marinov –
It should be available for purchase in Europe. Please check with the manufacturer directly.
Miren Aguirre –
Please, when will it be available in Mexico?
Bobby Marinov –
Hello Miren, our team doesn’t know when the device will be available in Mexico but we do know that Mexico has its own exoskeleton companies such as Roki.
Solange –
Fantastic ! When it will be available in Brazil ?
Where in Europe you can buy it ?
Is there a weight limit ?
Are elderly people using it in Japan ?
Bobby Marinov –
At the moment the information is unclear. Several readers have e-mailed that they are having trouble connecting with Honda regarding use and sales information. This is a brand new technology and market, so some delays are to be expected. Stay tuned for more information.
Kartikeya Mande –
Hi!I am from India .My mom is a stroke patient and she is unable to walk for 4 months and I want to buy this machine Is it available in india.Please help me with the contact number number and email ID
Please need your help
Bobby Marinov –
Hi, I am sorry to hear this about your mom. At the last WearRAcon, we discovered that there is a government pilot program to bring exoskeletons to rehabilitation centers. Stay tuned for more information. Until then, don’t despair. At this point, exoskeletons for rehabilitation are just another tool for physical therapists. Your mom can still make a recovery even without these wearables.
E. Williams –
Hi Would love to purchase one of the Honda Power assist where can I ?WONDERFUL!
Bobby Marinov –
Hi Williams, not entirely sure at this point. This is the number one asked question that we have.
Sara –
Hi Mr marinov. I want to buy it for my dad. i live in iran
From where can I Buy it?
Bobby Marinov –
Hi Sara. Your best bet is to contact the manufacturers directly. FYI: there are at least two universities in Iran that have developed their own exoskeletons. I am not sure if any of them are for sale. Even if not, that could be an excellent starting point for researching what is available for use in Iran.
Paul –
It seems that Honda did a research project but they have no idea how to market it. They are trying it out in Japan.
It leased for 36 months for about 365 a month. Ok. I am still lnterested. Lots of people want it. I have stroke damage and it seems to be just what I need. It could free me from using the electric carts in the grocery stores and maybe I could walk the dogs again. In the long run Honda can get all its R and D money back lf they make it inexpensive. I would say 1-2 thousand dollars. There wil always be a market for it as there will always be disabled people.
Bobby Marinov –
Well said Paul! There will always be a market and Honda have spent decades with robotic walking and it is about time they started making some of their R&D money back.
Personally, and this is just my opinion, I don’t think Honda doesn’t know how to market it as much as how uncharted a territory this is. For example, you buy a motorcycle, you know what the risk is. If you fall from a Honda motorcycle, through legal precedence, you know when it is your fault and when you can blame the manufacturer. That’s not really the case with wearable robots. What is really the expectation for the device? What is the risk of using it? Are there any side effect from prolonged use for 1,2,5 years. I think a company with a reputation to safeguard like Honda will let some smaller companies test the waters first; they just don’t appear to be in a hurry.
Rimon –
Hi,
How can I get a one here in Cairo_egypt, and is it usefull in case of monoplegia ( can use the right leg and the left leg is very weak ).
Pankaj S Sundrani –
Hi Bobby
Myself from Gujarat State of India, can you advise if it is available in India and whom to contact?
Will be waiting for details..
Bobby Marinov –
The availability for this device is as of yet unclear, and you are not alone in wondering when and where this device will be sold.
Alaa –
Is this available to buy or order in Egypt or any gulf country? We need it urgently and cannot find anything like this here.
Bobby Marinov –
Not at this time as far as anyone on the ExR team knows. Sorry.
Trym –
Can i buy this in norway, and how
Bobby Marinov –
Sorry, at this time we don’t know.
Trym –
I want to buy there. Whats the price
And where can i buy these
Ali Mehdi –
can i get pakistan ? islamaabad for my mom ? my mom have parkinson disease age 65 ?
Kamran –
good day
i’m writing you from Iran.
appriciated if your please let me know how can i buy the one for my mother.
be waiting for your kind reply and support.
BR
Kamran
Narasimha Nookala –
Hi:
I am interested in purchasing or participating in a study/eval of this. I live in San Jose, California, USA. How do i enroll to either buy one or lease one or participate in a study
Bobby Marinov –
Hello from Sunnyvale CA. Your best bet is to keep an eye on the developer’s website news&announcements. There are also a few government websites that try to keep on top of keeping lists of medical studies in the US. We also try to re-post any study participant recruitment announcements on Twitter.
Amir –
Hello Sir, , I am 38 Y old and i have Hip joints arthritis would Honda walking assistant is useful for Hip arthritis or for Hip replacement needed patients. And is this available in Pakistan and what its price.
Thank you.
Bobby Marinov –
Hello, at this time I don’t believe there are any Walking Assist devices for personal use. This can of course change at any time depending on what Honda does with their exo moving forward.
Chakra Kuruganti –
Hi, I am from UK and interested to purchasing this unit. How to lease, buy or participate in trials.
Bobby Marinov –
Good questions. Unfortunately, we (the Exoskeleton Report team) don’t have the answer at this time.
Richard –
Where is this available for purchase? Japan? Korea? China? Eastern Europe or the EU? England? India? US, no. Is it available for purchase anywhere? Or is it just sitting in a research facility?
Bobby Marinov –
Hi Richard, I understand your frustration with the lack of information on this matter.
Altamash shaikh –
Please we cant contact to buy it we seriously need this device for my mom and its not available in mumbai (India) if you can help me out plz reply We mailed to honda company but no response so plz its urgent plz reply me
Bobby Marinov –
Dear Altamash, unfortunately, I don’t know how to help. Our team doesn’t have any additional information either.
Annie –
I am in Sydney Australia and want to purchase the Walking Assist product. Where is my local stockist ?
Bobby Marinov –
Hi Annie, it would be best to reach out to the producer(s) of the exoskeleton device you are interested in directly.
Elyas –
hello sir, i am elyas, is it available in Kazakhstan ?
Bobby Marinov –
Hi Elyas, unfortunately our team doesn’t know if the Walking Assist is available in Kazakhstan, or anywhere outside of Japan for that matter?
Marion L –
Hello, I saw that this exoskeleton is also used in Japan for elderly people with walking difficulties, as well as carers for the elderly. Is there a chance to buy such an exoskeleton (in Europe/Austria)? And what is the price for that?
Marion from Austria
Bobby Marinov –
Dear Marion, this exoskeleton is developed in Japan. As of yet, our team is not aware if or when it will make its way to Austria or Europe.
Stavros Tottis –
Hello from Thessaloniki Greece…
I am a Primary Progressive Multiple Sclerosis patient and gradually my walking abilities faint away. I have been following the Asimo walking assist that seems that will assist me on (easier-lighter) lifting my thighs and legs and slowly retrain my brain on walking properly… Unfortunately I had no luck on contacting the manufacturer in order to get additional info on how to purchase ( or even lease) one.
Please if you have any information to give, I would be more than happy get.
Best regards
Bobby Marinov –
Hello Stavros. We are in the same boat. We don’t know anything more on this topic than what is already in the public domain.
Maria Koudelis –
….Can one buy it (or even lease it) in Japan ?. Is it for sale over there ?
So we could get it, indirectly ?
Bobby Marinov –
Hello Maria,
Good questions, but unfortunately our team does not have an answer at this time. If we hear more news we will be sure to post about it.
shanker Singal –
i am in India how can i get this
Bobby Marinov –
The current availability is as of yet unknown to us. We are all hoping that Honda makes an announcement or posts an update soon.
Steve West –
I have problems with neuropathy in both legs due to multiple back surgeries. I have foot drop as well. This creates problems with balance and coordination.
I am specifically interested in the walking assist unit
How can I contact the manufacturer? I am in the U S, but would travel to Canada if need be.
O
Please advise.
Steve West
Sagar –
Is this available in USA
Bobby Marinov –
We don’t believe that it is, yet.
Dr Sudjar Soemaropo –
This is useless because you have not been able to follow up to the manufacturer i.e Honda to get them to a point where sale is possible it is like ‘teasing’ not going ahead you started in 2018 that is now 4 years what a waste of writing. I have followed this a long time and at one stage it was supossed to be available for sale in India for $80 000 USD. WE went to Japan in 2018 but did not have time to visit any hospital where this unit was available there what a Croc
Bobby Marinov –
Dear Dr. Sudjar Soemaropo, what would you suggest? I think we are all frustrated that a titanic company like Honda with decades of experience in robotic bipedal locomotion has not released either of their wearable devices.
KIRAN PHALAK –
This is the worst or poorest form of customer service, not expected from a company like HONDA.
HONDA is known for its service and customer-centric approach. But here the customer support executive just saying that ‘we don’t know / we are NOT aware / please contact the manufacturer (no email id/ address / mobile/phone no. is provided). How are the interested customers supposed to reach out to the manufacturer?
So guys, please see my (Kiran) query (no2) at the beginning, posted on 23rd February 2018.
Now even after 4 years and 4 months, there is no satisfactory reply/ response to any of the queries put up by 34 customers after me. It only shows that the company is not interesed in giving any satisfactory reply to any of the inquiries.
So Mr. Bobby Marinov – if you at all care for the customers and interested parties, then get some concrete product information from HONDA company or just stop fooling the people who put their inquiry with great hope.
Request you kindly close this response page so as avoid disappointing future customers.
KIRAN PHALAK
18/06/2022
Angel moreno –
Is This available in the us now?
Bobby Marinov –
Not to the best of my knoweldge.
Akmal Nur Firdaus binti Nor Harshah –
How to purchase? I’m in Malaysia.
Dr. Sheldon Stein –
Like others i need the device for my right leg.
Sheldon Stein MD –
The device is obviously as remarkable as it is unavailable. Much like a good science fiction story.