

If users had the ability to customize the torque and timing settings on their powered exoskeletons would they have their own unique preferences? Dynamic Walking 2020 has been kind enough to publish its presentations with over four hours of talks and one of the segments is focused on just that exact question. Kim Ingraham presents the work of the University of Michigan, Ann Arbor, Robotics Institute, and Institute for Nonlinear Mechanics, University of Stuttgart. The full experimental results were published two years after the recorded talk in “The role of user preference in the customized control of robotic exoskeletons.” The experiments encapsulate the work by the presenter Kim Ingraham, David Remy, and Elliott Rouse (the presentation starts at 1:20:34):
The Full Experiment:
The above introduction on user preferences of applied torque characteristics for bilateral powered ankle exoskeletons was made when the study was just started. Fast forward two years later and the full study results were published in The role of user preference in the customized control of robotic exoskeletons. K. A. Ingraham, C. D. Remy and E. J. Rouse. Science Robotics, Vol 7, Issue 64, DOI: 10.1126/scirobotics.abj3487. A total of 24 participants took part in the study divided into two groups of 12. One group was participants that were aware of exo technology. This includes people who have never tried wearing a powered exoskeleton but had just heard about them before. The second group was made of people who didn’t know anything about wearable robotics beforehand.

Identical to the test protocol described by Kim Ingraham above, the participants were given the opportunity to change two control parameters of the Dephy ExoBoot powered ankle exoskeleton. Participants used a Microsoft Surface to fine-tune the torque peak magnitude and time. All other parameters of the force curve remained constant. For each test cycle, the screen was wiped and the orientation and location of the settings were randomized. Just like with the initial two subjects in the video above, all participants in the study demonstrated a preferred setting and were able to return back to that setting through trial and error.
This fundamental research opens a new page towards mastering the adoption of robotic exoskeletons. By seeding some control to the users, the users of the exo can optimize the powered wearable to their unique perception, which can be based on comfort, stability, pain, symmetry, and perceived exertion. This would be similar to adjusting a driver’s seat in a car. There are ergonomically optimal settings for the driver’s chair height, angle, and distance from the steering wheel, but drivers prefer to be able to do their own finetuning and tend to adjust the seats exactly the way they prefer them. This study demonstrates that given the opportunity, exoskeleton users would have a preference that they can recreate even if the controls are shuffled and randomized.
Additional Observations:
- There was no observed correlation between body mass or height and the preferred settings.
- Not a single participant raised the assistive torque amplitude to its maximum.
- The user’s preferred timing did not match the biological one (there will be a separate article on this topic soon).
Familiarity with Exo Technology Mattered
Participants with prior knowledge of exoskeleton technology, even if it was not hands-on knowledge, preferred a higher starting assistive setting from the powered ankle wearable. It is plausible, that prior understanding of the technology and its goals contributed to the users being more adventurous and were more comfortable with handling higher assistive forces. This highlights the importance of educating the users about the potential benefits of exoskeleton technology. Just learning a little something about wearable robotics beforehand may directly change the way the users interact with the device.
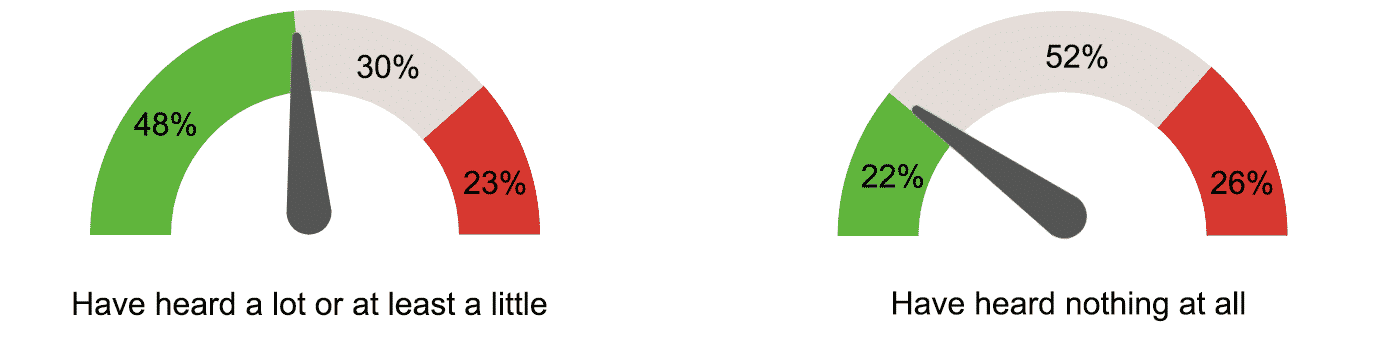
Coincidentally, this matches the results from the 2022 Pew Report on Artificial Intelligence (AI). In that report, participants were asked if powered exoskeletons with built-in AI for strength augmentation will be positive for society in the long run. No single factor other than prior exposure to information on exoskeleton technology was as critical towards having a more favorable opinion of this emerging technology. For more on the Pew Report, see: The Majority of Americans Have Never Heard of Robotic Exoskeletons with AI Control.
Prior Precident for Customization
Giving people options and settings to adjust may sound daunting at first, but car manufacturers have been doing this for years. Driver’s power seats come with 8 or more adjustable settings. The power seat settings can include the distance from the pedals, the height of the chair, recline angle, the seat cushion length, distance to the side bolsters on the seat and back, and the location of the lumbar support. The settings can be committed to memory, sometimes both on the car door panel and on the car’s keyfob. Multiple drivers can use the same car and have their own settings pre-programmed. If car drivers have been doing this for decades, it is plausible to see powered exoskeleton users having the option to do the same.
It is plausible that some exo settings and options will remain permanently baked-in and the users will have to buy a specific brand or model of devices. As an example, sports cars are expected to have a stiffer suspension, and more responsive steering but tend to be a bit louder and uncomfortable for long-distance trips. Those settings and adjustments are part of the car, and sometimes even brand identity. Rather than having an option to adjust everything on a powered exoskeleton, there may be some combination between the exo developer’s priorities and user fine-tuning. Long term, we may see some wearable companies develop a reputation for specific characteristics like auto companies. (Although, it is easy to see how exoskeletons could also remain ubiquitous, like power tools).
Reference:
User preference of applied torque characteristics for bilateral powered ankle exoskeletons, Dynamic Walking 2020 Session 1, Kim Ingraham, Published May 14, 2020, via YouTube, link
The role of user preference in the customized control of robotic exoskeletons, K. A. Ingraham, C. D. Remy and E. J. Rouse. Science Robotics, Vol 7, Issue 64, DOI: 10.1126/scirobotics.abj3487







Add Comment