

Fit and comfort are critical to adopting exoskeleton devices, but they are usually evaluated subjectively through questionnaires and surveys. Last year, we highlighted a research paper that begins the process of quantifying the comfort limits of physical interactions on the human body: Characterizing the Comfort Limits of Applied Forces To Inform Exosuit Design. Since then, presentations during events like WearRAcon and ExoBerlin have only further reinforced the importance of this topic.
The last few years have demonstrated a clear need to focus on user acceptance of wearable technology. Successful in-lab studies that validate the effectiveness of exoskeleton devices are not enough. The exoskeletons also have to be comfortable enough to wear or risk being abandoned. The CDC has also voiced their concerns, such as in this article on industrial exoskeletons from 2020. While it can be agreed that a comfortable fit of a wearable device is critical, there isn’t established research on the forces (pushing, pulling, shear) that the average user would tolerate.
The above is why Characterizing the comfort limits of forces applied to the shoulders, thigh, and shank to inform exosuit design by Matthew B. Yandell, David M. Ziemnicki, Kirsty A. McDonald, and Karl E. Zelik is important. The paper cannot answer all of the questions but provides an example of objectively evaluating comfort limits.
Methodology:
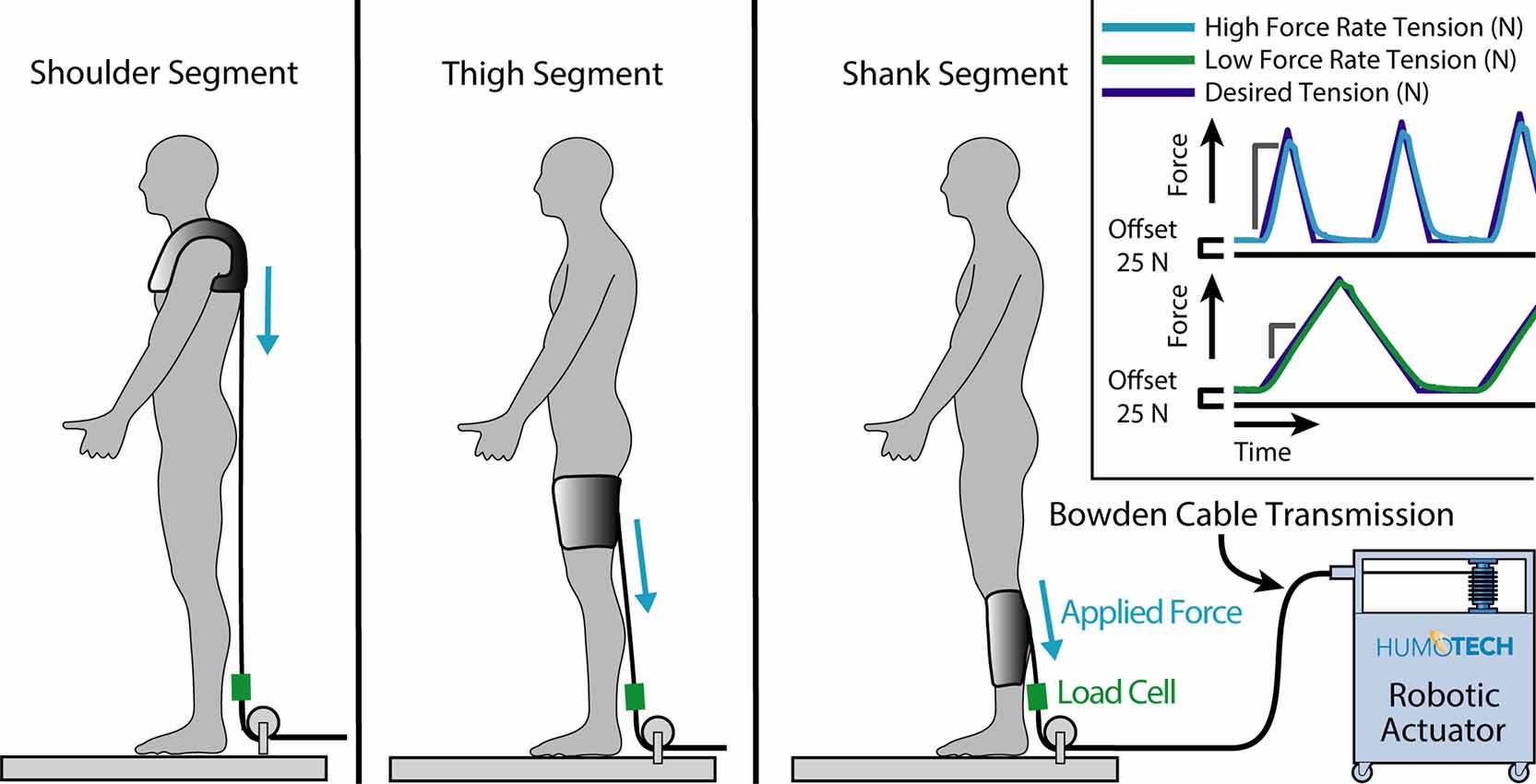 The experimental design utilized a support frame, an actuator system by Humotech which applied forces downward to the interfaces located on the shoulders, thigh, and shank, and an LCM300 single-axis load cell by Futek. Forces were applied repeatedly until the ten subjects, five males and five females age 24 ±2 years old, indicated that they did not want to experience any higher loads. The median comfort limit was then computed from the trials for each of the three body areas of every participant over several days.
The experimental design utilized a support frame, an actuator system by Humotech which applied forces downward to the interfaces located on the shoulders, thigh, and shank, and an LCM300 single-axis load cell by Futek. Forces were applied repeatedly until the ten subjects, five males and five females age 24 ±2 years old, indicated that they did not want to experience any higher loads. The median comfort limit was then computed from the trials for each of the three body areas of every participant over several days.
Results:
It appeared that a higher frequency of force application for all body test areas resulted in higher tolerance levels. In addition, the comfort level tended to increase with each day of testing. The article also notes that the tested forces are higher than the literature reported values for exosuits.
More importantly, the study also demonstrated signs of habituation. On average, the participants showed greater tolerance to the applied forces with each day. This adds more evidence that even a few hours of training on an exoskeleton product can yield different results. However, the study length and maximum allowed applied forces were limiting factors. Another noteworthy finding was the large variability in results from person to person. This serves as a reminder that while trends and averages can be obtained, all of us are unique and can respond differently to a wearable device.
Future Work:
The Vanderbilt team is also engaging the Humotech actuator in other experiments to study musculoskeletal and exo device interaction, testing for optimal stiffness levels in back-assist exosuits. Yandell (Ph.D. from Vanderbilt in mechanical engineering and co-founder of HeroWear) has also used it to test HeroWear’s exosuit hardware. The above presentation by Dr. Karl Zelik, HeroWear Chief Scientific Officer, from WearRAcon 20, touches upon this work. “This research demonstrates the importance of collaboration in advancing the field of exoskeleton technology. HeroWear and Humotech working together is a somewhat uncommon pairing, and we’re working hard to forge similar collaborations with other companies,” stated Josh Caputo, CEO of Humotech.
Research like Yandell’s and Zelik’s helps set benchmarks for exosuit design needed to move the whole industry forward. The results from the Vanderbilt comfort limits study were conducted in parallel with the development of HeroWear, so the learnings were available to inform the development of HeroWear’s premier back-assist exosuit, the Apex back support exosuit.








Add Comment