

The National Institutes of Health (NIH) has awarded medical exoskeleton research veteran Karen Nolan, Ph.D., and Soha Saleh, Ph.D. a $3,547,908 grant to study the effects of using medical walking-assist exoskeletons shortly following a stroke. Both are research scientists at the Center for Mobility and Rehabilitation Engineering Research (in New Jersey) at the Kessler Foundation. Dr. Nolan and Dr. Saleh are co-project directors for the study “Functional and neurophysiological effects of a progressive robot assisted gait intervention early post stroke.”
The team is scheduled to conduct a five-year study of “intensive high-dose gait therapy in the acute phase post stroke, using a protocol of robotic exoskeleton-assisted gait training.” Part of the rationale is that those that have suffered a stroke could make a faster and more complete mobility recovery with the introduction of early, safe, and highly consistent physical therapy.
The Kessler Foundation is no stranger to implementing, evaluating and understanding the use and impact of medical exoskeletons. For this study, researchers will collect data on functional recovery after utilizing a gait-assist exoskeleton. The goal will be to collect enough “neuroimaging data and neurophysiological measurements to shine more light on the mechanisms underlying the effects of exoskeleton-assisted gait therapy, and help form the basis for a new model for predicting prognosis for recovery.”
“Predicting prognosis for recovery based on neuroimaging and neurophysiology outcomes will provide evidence for brain plasticity in response to the utilization of wearable robotic exoskeletons,” said Dr. Saleh, co-principal investigator, “and that will contribute to future developments in rehabilitation strategies to advance stroke rehabilitation.” Study participants will be recruited from the Kessler Institute for Rehabilitation. The neuroimaging studies will be conducted at the Rocco Ortenzio Neuroimaging Center at Kessler Foundation, a rehabilitation research-dedicated facility.
“We anticipate that intervening soon after stroke with intensive progressive and adaptive assist-as-needed exoskeleton-assisted gait training will improve recovery in these patients,” said Dr. Nolan, co-principal investigator. “Through this study, we will determine the best way to apply this comprehensive early intervention to individuals recovering from a stroke, so they can maximize their progress during rehabilitation, and achieve the best possible outcomes,” she concluded. “This grant will contribute to transforming how we view stroke recovery, and continue to change the prognoses for stroke survivors.”
Dr. Karen Nolan was a speaker at the third day of WearRAcon19’s medical track where she presented medical exoskeletons from an often overlooked point of view: not that of the user, the developer or the evaluator, but that of the rehabilitation professional that has to administer the gait training. The first step of medical devices is getting the therapists and clinicians to be confident before having to worry about if the technology is useful to the user. You can’t just throw a medical exoskeleton on a person.
The Kessler Foundation has a 10-week guideline for gait training focus areas. The clinician needs to have the necessary skills to quickly troubleshoot the unit while on the user. This is key to make the device successful. There a lot of challenges that need to be figured out. How do you transport an exoskeleton from one floor to another? How is each adjusted from patient to patient? How to change the battery if it runs out in the middle of a session?
The rehabilitation program is not just interested in walking speed, which is noticeable and easily observable. From an outcomes point of view, weight shift and gait symmetry can be just as equally important. Similarly, videos show patients walking with exoskeletons, but pre-gait exercises such as side-stepping and squatting, while not very cinematic are also vital. (Click here if you haven’t already, read our full coverage of WearRAcon19 Day 3 which also featured Dr. Nolan’s colleague at the Kessler Foundation, Dr. Gail Forrest).
In addition to winning research grants, Dr. Nolan also has one of the few TED Talks devoted purely to exoskeletons (with over 130K views):
In her talk, Dr. Nolan focuses on the rehabilitation needs of post-stroke patients suffering from hemiplegia. Hemiplegia is a form of paralysis on one side of the body due to brain damage from stroke.
In her TEDxHerndon talk, Dr. Nolan spends more than half of her time focusing on the needs and challenges faced by stroke patients with hemiplegia and hemiparesis (weakness on one side). She then slowly transitions into the potential of robotics for stroke rehabilitation.
At the 11 minute mark, Dr. Nolan brings up the intensity of her talk to an 11. She presents a video segment demonstrating real-world rehabilitation. She then compares the classical rehabilitation with that of a robotics device, the Ekso GT. She dissects the usefulness of the Ekso GT rehabilitation exoskeleton beyond what can be observed by the naked eye. In her talk, she presents the muscle activations of a major muscle group with and without the exoskeleton. Furthermore, she exhibits a full 3D kinematic model of the human body with and without the use of an exoskeleton:
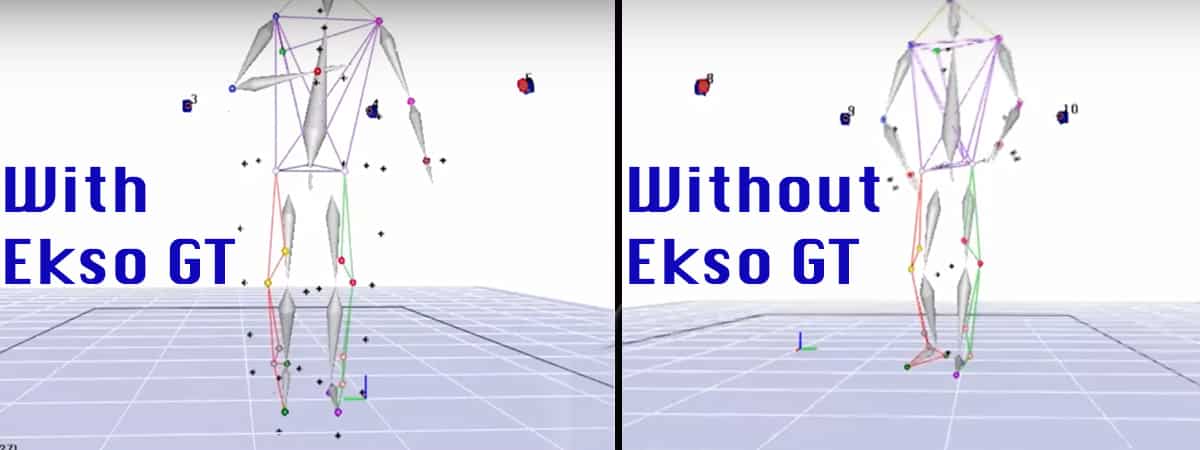
In the image above, you can see a person performing walking with the help of the Ekso GT. The person is moving towards the screen. The left hand is supported by a cane. Both feet are pointing in the correct direction and the step will not be executed until proper weight shift is detected by the exoskeleton.
In the image to the right, the patient is undergoing classical rehabilitation. One person is holding a cart which supports the left arm. A second person is manually moving the right leg. Note that the leg is pointing outwards. More importantly, and what would be missed by just looking at a video, there isn’t a proper weight distribution. The person is leaning on the cart with their left arm, and the right foot is being dragged along. This dramatically decreases the quality of the rehabilitation session.
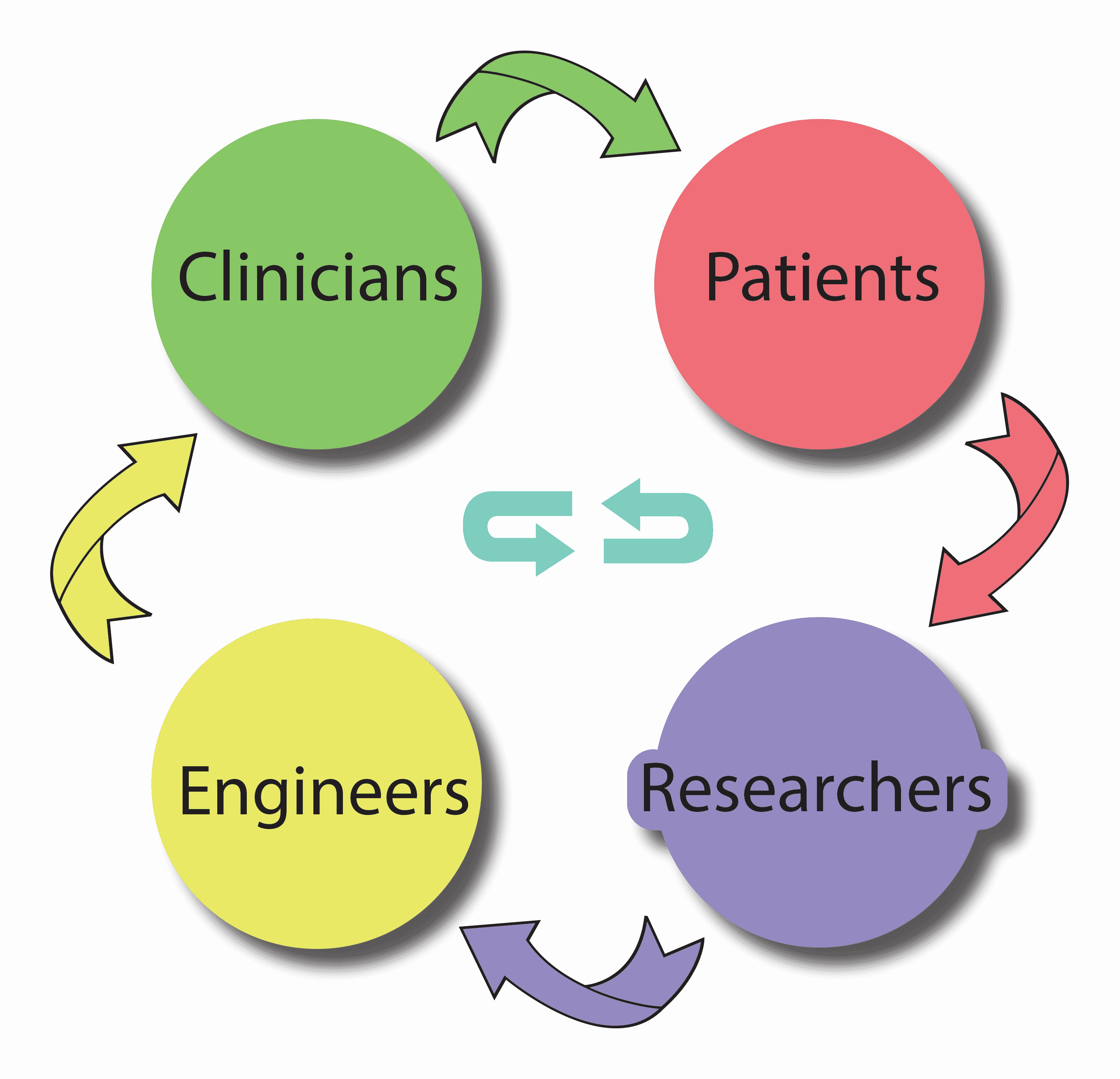
Dr. Nolan concludes her presentation with a suggestion on how robotics for stroke rehabilitation can be improved. She suggests that engineers, medical professionals, patients, and researchers work more closely together. The goal of this collaboration would be to more closely define who would and wouldn’t benefit from using rehabilitation robotics. How long should the sessions be and what procedures should be followed? Amazingly, these are exactly the same challenges listed by Dr. Dylan Edwards in his June presentation at Ekso Bionics: Objective Discussion Of The Ekso GT and Adoption Challenges.
Conclusion:
The Kessler Foundation has already done so much to objectively understand medical exoskeletons for walking rehabilitation. In light of their publicly published body of work over the last half-decade, the NIH grand appears to be well deserved!
Sources:
Kessler Foundation researchers receive grant to study robotic intervention post stroke, Press Release, The Kessler Foundation, Sep 6, 2019, https://kesslerfoundation.org/press-release/kessler-foundation-researchers-receive-grant-study-robotic-intervention-post-stroke
Robotics for Stroke Rehabilitation, Karen J. Nolan, TEDxHerndon, August 2016, Recorded May 2016, TEDxHerndon, NS2 National Security Services, YouTube https://www.youtube.com/watch?v=MK9AkQ2Zu_w






Add Comment