

Now anyone can get involved in the exoskeleton industry! Presenting a wearable robot constructed entirely out of Legos! This is a powered, hip-knee exoskeleton made using 4 LEGO NXT controllers and 12 first generation LEGO NXT motors powered by 24 AA batteries and attached by double-sided velcro. Three motors are attached to each hip and knee and produce roughly enough torque equivalent to 1 or 2% of that generated by a healthy human body. This is enough torque to help with the swing of the leg as long as the user is relaxed. The exoskeleton is controlled using push-buttons, which takes some getting used to but provides maximum control. Below is a video featuring the LEGO Powered Hip-Knee Exoskeleton in action on the streets of San Jose, CA.
Why build such a contraption? My martial arts instructor always used to repeat “1000 minutes of theory is worth 1 minute of practice.” As a student in college with little hands-on experience, I didn’t want to believe him, but now that I have worked in R&D for several years I have to come to appreciate the value of practical experience. All of the long-winded theories and explanations aren’t worth a dime in the face of a well designed experiment that disproves them.
Over the past year I have greatly enjoyed writing about the challenges and successes of the over 35 companies exploring wearable robotics technology. However, I thought that I could be a much better writer if I could experience first hand the challenges of developing an exoskeleton device.
Development:
I had the motors but not the working space to build an exoskeleton frame, but I did have a sizable Lego collection. I always thought that one of the worst qualities in building large LEGO structures is how easily they bend, which ironically is a great advantage to building a comfortable wearable. My first few prototypes were a failure as the high torque generated by the hip and knee completely overwhelmed the plastic and broke my LEGO axles. I then took some CNC machine classes in the hope of manufacturing my own steel axles and gears that can survive the high forces. Fortunately, this proved unnecessary, as I discovered that connecting the NXT motors one against the other in groups of 3 provided more than enough attachment points. The joints which used to be the weakest point in the design suddenly became the strongest. As a result, I was able to make the exoskeleton without having to modify, glue, or modify/damage any of the LEGO parts.
Design Evolution:
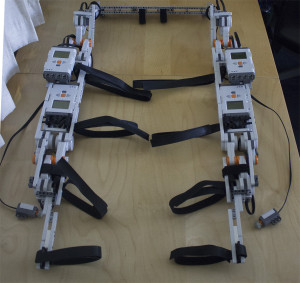 The initial design was a powered knee only exoskeleton, which while much lighter is surprisingly less comfortable to wear. The hip-knee exoskeleton has exactly the same design at the knees, but having the structure firmly attached at the hip through the belt loop somehow makes the wearable robot many times more comfortable. With the powered knee only setup my knees would cramp up after use, while I have not experienced any negative side effects from using the hip-knee version.
The initial design was a powered knee only exoskeleton, which while much lighter is surprisingly less comfortable to wear. The hip-knee exoskeleton has exactly the same design at the knees, but having the structure firmly attached at the hip through the belt loop somehow makes the wearable robot many times more comfortable. With the powered knee only setup my knees would cramp up after use, while I have not experienced any negative side effects from using the hip-knee version.
The hip-knee exoskeleton is vastly superior to the knee only version with one exception. The device is now so heavy that it offers no noticeable assistance to climbing stairs. That was somewhat surprising, because I thought that by providing actuation at the hip and the knee there should be more than sufficient energy to have noticeable power assist during stair ascending.
Future work:
Currently there is somewhat of a split in exoskeleton research between ankle only and hip-knee only wearable robots. The Wyss Institute and Carnegie Mellon focus on the ankle as the joint that provides the most energy during walking. Rehabilitation exoskeletons by US Bionics, Ekso Bionics, ReWalk Robotics, Parker Hannifin and others are powered hip-knee devices. NASA, Hyundai and a few research labs have exoskeletons with full hip-knee-ankle actuation which I hope to be the next iteration. I would like to know the difference between knee, hip-knee and hip-knee-ankle devices, even if it is underpowered as the LEGO one is.
Cost:
The current iteration of the LEGO Powered Hip-Knee Exoskeleton will come out to $1,400 if all parts are bought new (most of mine were bought used). While the LEGO version is greatly underpowered, it is still somewhat surprising that the full commercial versions cost $70,000 and more. Hopefully, companies can decrease the cost of rehabilitation devices to $20,000 per unit or less.
Future DIY and homemade exoskeletons:
There are already many people working in their spare time on wearable robotic devices and I hope that the number increases. Many great corporations were started as a small DIY project in someone’s garage. Wearable robotics is a new field that is still poorly understood on the theoretical side, and the more people that have hands-on experience the better for this budding industry.
For more information on the LEGO NXT visit: http://www.lego.com/en-us/mindstorms/products/31313-mindstorms-ev3








Add Comment