

Most discussions about exoskeletons still focus on rehabilitation, industry, and defense. Education is often seen as a niche application, but that could be a mistake. Training might become a key use case for physically interactive wearable robots, and some of the most innovative teaching systems could be right on the line between true exoskeletons and technology-related user-machine training robots.
The reason is simple: learning a skilled movement isn’t just about receiving information. It’s about getting the right movement, in the right way, often enough for the body to recognize it as a pattern worth keeping. In archery, for example, one good shot means very little. What matters is accurate alignment, reproducibility from shot to shot, consistency over time, and enough repetition of correct movements for the pattern to stabilize. Repetition without accuracy only ingrains errors. Accuracy without repetition doesn’t develop into skill. Educational exoskeletons and haptic robots are becoming increasingly compelling because they promise both.
What makes this moment particularly interesting is that the field now has examples of instruction at three different physical scales: as a tool-holding, limb-supporting, or finger-level.
At the tool level: RoboGolfPro
RoboGolfPro is not a wearable exoskeleton, but it is relevant to this discussion. The company describes it as a robotic swing trainer that helps golfers “feel” their ideal swing. Its main purpose is educational: the system assesses the golfer’s body and swing, considering factors like flexibility, height, and weight. Then, the golfer holds the club while the robot executes the programmed motion, allowing the golfer to feel it and develop muscle memory.
That makes RoboGolfPro more of a user-machine interaction learning device than just a simple training aid. Partner and media descriptions explain that the system can guide learners through hundreds of pro swing patterns and even let users experience famous swing signatures, including those of Tiger Woods. Pebble Beach described it as a way to feel the positions and sequencing of pro swings in slow motion, then gradually increase speed to help build muscle memory. Exoskeleton Report has described the device as a multi-axis end-effector robot, specifically noting that its swing trajectories do not need to remain in a single plane of motion.
That distinction matters. RoboGolfPro does not directly strap onto the body, so it fails the wearability test that usually defines an exoskeleton. Exoskeleton Report’s Podcast discussion with Dr. Tom Sugar places it closer to a cobot than a true exoskeleton. But the educational logic is remarkably similar. The machine physically constrains and guides motion, exposes the learner to repeatable trajectories, and allows a coach to deliver dosage with unusual precision. Just as importantly, outside accounts make clear that the robot is not a substitute for instruction: it can guide the golf club, but a human coach is still needed for the rest of the body, timing, and context.
At the limb level: the violin exoskeleton
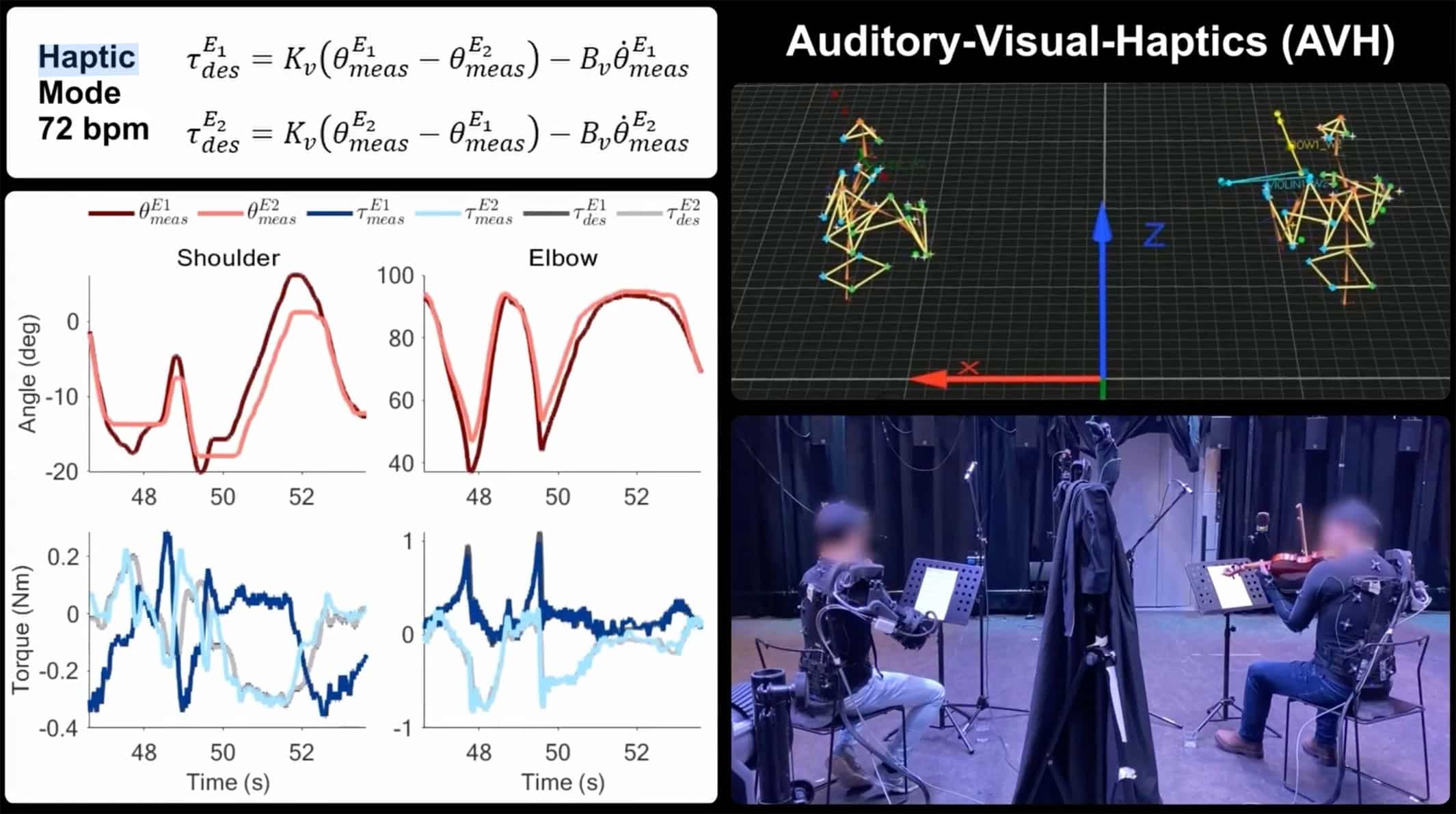
If RoboGolfPro teaches through a tool, the recent violin study demonstrates learning through the arm itself. In a March 2026 Science Reports paper, Aleksandra Michałko and colleagues tested twenty violin duos performing under auditory (A), auditory-visual (AV), auditory-haptic (AH), and auditory-visual-haptic (AVH) conditions. Haptic feedback substantially improved spatiotemporal coordination and dynamic musical alignment relative to the auditory and auditory-visual conditions, and the multisensory AVH condition scored highest overall. The effect was especially strong for professional musicians.
A related 2026 Scientific Reports paper by Campo et al. addressed the more explicitly educational question of novice violin learning. In that study, novices trained with an upper-limb wearable exoskeleton that guided bowing movements. Compared with audiovisual-only instruction, the haptic group outperformed the control group during recall, improved on spatial and spatiotemporal kinematic measures, and reported positive learning effects. At the same time, the study noted that temporal metrics did not improve in the same way and that the device interfered with some natural shoulder movement, pointing to areas for refinement.
Taken together, these papers strengthen the case for educational exoskeletons in music. One shows that robot-mediated haptic coupling can outperform vision for fine motor coordination in violin duos, and the other suggests that exoskeleton-guided bowing can improve specific aspects of novice technique. Explaining violin technique is often challenging because the teacher tries to demonstrate a dynamic three-dimensional relationship between the shoulder, elbow, wrist, bow, and instrument. A wearable teaching robot shifts the teaching method. Instead of asking a beginner to imagine what correct bowing should feel like, it can guide the arm along a target path and make the correct movement physically clear.
At the finger level: piano exoskeletons
Technology like this can benefit both pros and beginners. In a 2025 Science Robotics paper, Shinichi Furuya and colleagues used a custom hand exoskeleton capable of moving individual fingers independently in flexion and extension. Their main question was whether exposure to fast, complex finger movements could help expert pianists break through a plateau in overlearned skills. The answer was yes: the positive effect was observed when pianists were passively exposed to fast, complex multi-finger movements they could not voluntarily produce, and the improvements persisted after the exoskeleton was removed. The training benefits also transferred to the untrained hand, showing that the device provided more than temporary help; it altered motor organization and learning.
That is a strong educational point. Education does not stop with beginners. Effective teaching technology should support learners at multiple stages of skill development, from initial exposure to expert refinement.
What ties these systems together
These three examples illustrate a useful spectrum. RoboGolfPro operates at the tool level, the violin exo functions at the arm level, and the piano exoskeleton targets the digit level. Different interfaces, same educational goal: a physically guided experience that combines accuracy, consistency, and repetition.
That matters because many bodily skills are difficult to learn through words alone. A coach can say “lag the club,” “relax the shoulder,” or “individuate the fingers,” but verbal instructions often fail when the movement is quick, subtle, or outside the learner’s current body map. Haptic systems provide another channel. They enable the student to feel the target, not just hear about it. In that sense, the promise of educational exoskeletons isn’t that they replace teaching, but that they help teaching become embodied.
The cautionary note
The case for educational exoskeletons looks promising but isn’t conclusive yet. RoboGolfPro still relies on a coach and doesn’t automatically correct every full-body mistake. In the violin literature discussed here, the Scientific Reports novice-learning paper reported interference with natural shoulder movements and cautioned that the study did not include long-term retention measurements; it also noted that the small sample size limits generalizability. The piano practice displayed impressive, task-specific improvements, but those gains were closely tied to movement patterns rather than a broad, general increase in dexterity. In short, these systems are not magical. A better title for this article might be “When the Robot Becomes the Teacher Assistant: Exoskeletons, Haptic Guidance, and the Future of Learning Movement.”
Where this could go next
Non-military learning opportunities go beyond golf, violin, and piano. Archery is a good example because it relies on reproducible setup, stable alignment, and repeated exposure to the same draw pattern. Activities like rowing, tennis serves, baseball swings, drumming, calligraphy, handwriting, and even surgical knot-tying or suturing all share a common requirement: there is a target motor pattern; it matters if the learner can reproduce it; and the training benefit depends heavily on how many correct repetitions occur. The most effective activities are probably those where motion can be measured, the safety margin is manageable, and the task is structured enough that “feeling the right movement” offers a real learning advantage.
Educational exoskeletons and related haptic robots are still a small field, but they are no longer just ideas. We now have multiple deployed golf robots that teach through the club. There are multiple studies involving wearables. These developments suggest that a key future for exoskeleton technology may not only be to help people work more safely or regain lost functions but also to support learning or improve skilled movements.
References:
-
RoboGolfPro: robogolfpro.com
-
Shinichi Furuya et al., Surmounting the ceiling effect of motor expertise by novel sensory experience with a hand exoskeleton. Sci. Robot.10,eadn3802(2025).DOI:10.1126/scirobotics.adn3802
- Campo, A., Peperoni, E., Capitani, S.L. et al. Haptic feedback in violin education as a case study of robotic exoskeleton-mediated motor learning. Sci Rep (2026). https://doi.org/10.1038/s41598-026-39226-8
-
Michałko, A. et al. Robot-mediated haptic feedback outperforms vision in violin duo coordination. Science Robotics11(112): eaeb1901 (2026). DOI: 10.1126/scirobotics.aeb1901.
This article was updated on March 20, 2026 to clarify that the violin section discusses the March 2026 Science Robotics paper on violin duo coordination and to add the final Scientific Reports citation for the related novice-learning study.






Add Comment