
How did we end up with the terms that now dominate wearable robotics? Today, “exoskeleton” is almost inseparable from augmentation systems worn on the human body. But historically, the term did not begin in robotics at all. It began in 19th-century anatomy and zoology, where it referred to an animal’s external supporting structure – the hard outer framework seen in crustaceans, insects, and similar organisms. Reference works differ slightly on the earliest attestation: the Oxford English Dictionary places the noun in the 1830s, Etymonline dates it to 1841 and attributes the term to Richard Owen, and Merriam-Webster lists 1847 as its first known use.
That biological origin matters because it helps explain why the word transferred so easily into engineering. An external skeleton is already, by definition, a structure on the outside of a body that provides support and protection. Long before powered wearables, the word had already done most of the conceptual work. When engineers began building human-worn support structures, they did not need to invent an entirely new metaphor; they could adapt one that already described an outer frame. It is also worth noting that the adjective “exoskeletal” appears later in the dictionary record than the noun “exoskeleton,” which helps explain why the noun feels older and more settled.
When wearable human-assist systems emerged in the mid-20th century, however, formal engineering language often favored the adjective “exoskeletal” over the noun “exoskeleton.” Neil J. Mizen’s 1964 Cornell Aeronautical Laboratory report was titled Design and Test of a Full-Scale Wearable Exoskeletal Structure. NASA’s 1966 bibliography summarized the same line of work as the development of a wearable exoskeletal device intended to amplify muscular strength and increase endurance. Mizen’s 1969 patent kept the same pattern in its title: Powered exoskeletal apparatus for amplifying human strength in response to normal body movements.
But the record does not show a clean, instant handoff from adjective to noun. It shows overlap. The 1964 report abstract says the motion restrictions caused by “the exoskeleton” were slight, while also referring to an “exoskeletal device” and future “powered exoskeletal structures.” Mizen’s patent text likewise says the device consists of a structural exoskeleton, even though the patent title still uses the adjectival form. In other words, early engineers were already using both forms, but not always in the same place or for the same purpose.
By 1965, the noun form had clearly become usable in mainstream popular writing. The November 1965 Popular Science article was titled Machines That Let You Carry a Ton, and its deck invited readers to “strap on the exoskeleton.” Inside, the article uses the noun repeatedly while also discussing the broader “man amplifier” concept. That is historically important because it shows the noun had already escaped narrow technical prose and become understandable to a general audience.
This helps explain the drift from “exoskeletal” to “exoskeleton” in wearable robotics. The change does not appear to have come from a single inventor, publication, or standards body. It looks more like ordinary linguistic simplification. “Exoskeletal” works well as a modifier: exoskeletal structure, exoskeletal device, exoskeletal apparatus. But it is awkward as the main name of a machine. “Exoskeleton,” by contrast, is a clean noun, easy to remember, already familiar from biology, and well suited to wider use. That is an inference rather than a formal ruling, but it fits the documentary record well.
A later language shift produced the phrase “passive exoskeleton” as an explicit technical category. Early devices could certainly be passive in function, relying on springs, linkages, geometry, elastic elements, or load transfer rather than powered actuation. But one clear early example of the exact phrase appears in HRL Laboratories’ patent publication Passive exoskeleton, published in 2005 from a 2004 filing. By that point, the field had matured enough that engineers needed a cleaner way to distinguish powered systems from non-powered ones.
More recently, “exosuit” emerged as a separate branch of the vocabulary. A 2013 IEEE rehabilitation robotics paper was titled Biologically-inspired soft exosuit, and Harvard’s Biodesign Lab later described that early 2013 work as the first demonstration that a soft exosuit could positively affect mobility. The label mattered because it marked a deliberate contrast with rigid-frame exoskeletons. In common modern usage, “exosuit” usually suggests a softer, textile-based, cable-driven, or body-conforming system, while “exoskeleton” still tends to imply a more rigid external frame. The boundary is not perfect, but the distinction is real enough to matter.
So what began as a zoological term became an engineering adjective, then a device noun, and finally a family of subcategories. In that sense, the history of the word mirrors the history of the technology itself. The earliest literature described external structures. Later work described external machines. Today, the field commonly distinguishes among powered exoskeletons, passive exoskeletons, and exosuits, each carrying slightly different technical assumptions.
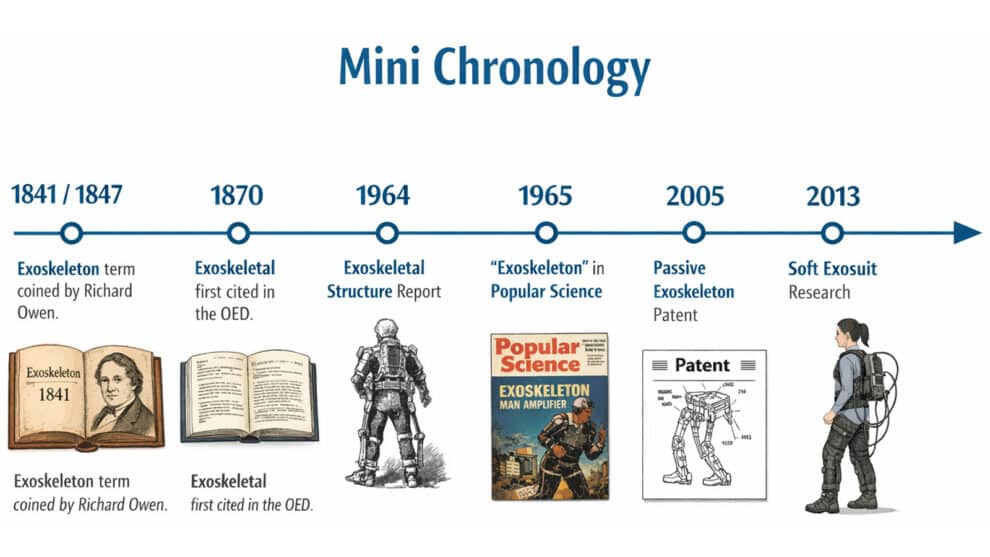
Mini Chronology
- 1841 / 1847: Etymonline dates exoskeleton to 1841 and says it was said to have been introduced by Richard Owen; Merriam-Webster lists 1847 as its first known use, while the OED places the noun earlier, in the 1830s.
- 1870: The OED dates exoskeletal later than exoskeleton, with earliest evidence from 1870.
- 1964: Mizen’s Design and Test of a Full-Scale Wearable Exoskeletal Structure uses the adjectival form in the title, but its abstract also refers to “the exoskeleton,” showing both forms in use at once.
- 1965: Popular Science uses exoskeleton prominently in a mainstream article about the Cornell man amplifier.
- 2005: Passive exoskeleton appears clearly as a technical term in patent literature.
- 2013: Soft exosuit enters the modern mobility-assist vocabulary in Harvard-associated research.
In short, “exoskeleton” did not originate in robotics, but robotics gave it a second life. The noun came first in biology, the adjective followed, and early wearable-machine engineers often preferred the adjective in formal titles such as exoskeletal structure and exoskeletal apparatus. Over time, the simpler noun became the more natural name of the machine itself. From there, the vocabulary expanded again, giving us the modern distinctions among powered exoskeletons, passive exoskeletons, and exosuits.
The story is still being written. Terminology in wearable robotics is more settled than it once was, but it is not completely frozen, especially as soft wearable systems continue to develop alongside rigid ones. Still, the main path is clear: a biological noun became an engineering adjective, then a machine name, and then a broader family of related terms.






Add Comment