

Nestled in the heart of Silicon Valley next to Highway 101 in Suite 101 is a transformative showroom of the future of industry and automation (Industry 4.0) created by Festo. Past the whirling conveyor belts and auto pipettes that can be controlled on a smart phone is a brand new way of working: the Tactile Telerobot.
The Tactile Telerobot gives users fine motion control over a humanoid robot with the ability to not only see but feel the interactions between man and machine. This is achieved through a collaboration of four distinctive companies:
- BioTac sensor by SynTouch – a sensor pod that is capable of measuring how an object would feel to the touch, including position, pressure and coarseness of the material
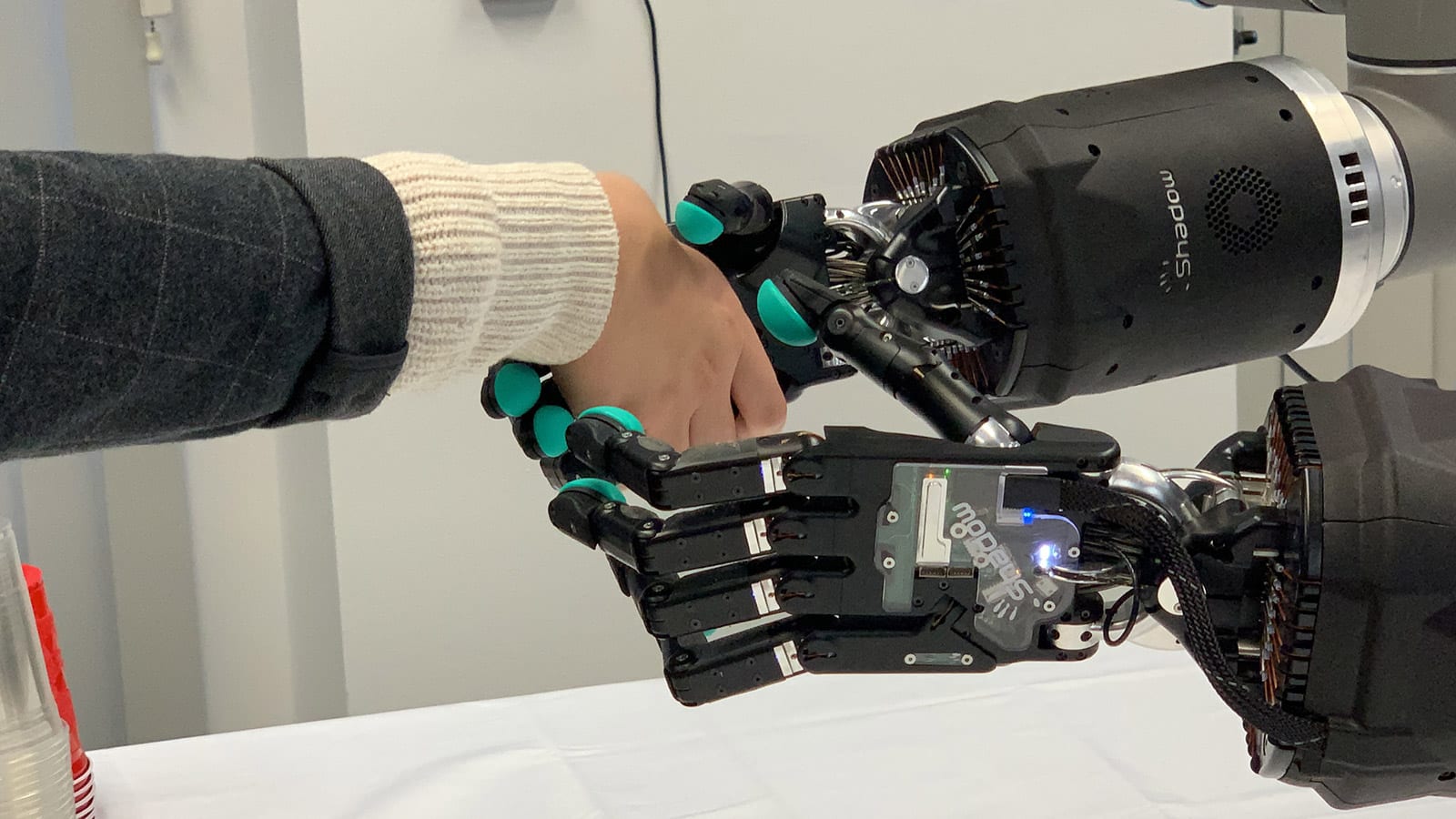
- Shadow Dexterous Hand by Shadow Robot Company – a robotic end effector that mimics the human hand
- Industrial robot by Universal Robots – support and place in position the Shadow Dexterous Hand
- HaptX Glove by HaptX – an exoskeleton glove that can detect the location and provide a resistive force against each finger including force-feedback on the skin of the hand
The sensors by SynTouch are attached at the finger tips of the Shadow Dexterous Hand which in turn is connected to two robotic arms provided by Universal Robots. The sensory data of gripping an object is mapped to the HaptX Glove which gives the wearer the ability to feel the object they are manipulating and adjust their hold respectively. The sensors in the glove in turn control the position of both the Shadow Dexterous Hands and the Universal Robot arms.
Getting both the people and products of four different companies to communicate with one another is not an easy task. The Tactile Telerobot demonstration would not have been possible without the efforts by Tangible Research and the support of All Nippon Airways, the latter of which is looking at alternative ways to have people “travel.”
The Tactile Telerobot solves a real problem: we rely on our sensation of touch for our hand-eye coordination. Human fingertips have as many as 3,000 pressure sensors each. Professor Roland S. Johansson at Umeå University in Sweden has spent a lifetime demonstrating the limitations for people to manipulate objects without sensory input from the skin. The sense of touch is just that important for fine motion control. The sensors by SynTouch that digitize the sense of touch and the exoskeleton by HaptX which re-creates it is a step forward for teleoperation of robotic devices with grippers.
The Tactile Telerobot Demo
The HaptX Gloves are much lighter than they look. At 400 grams each (that’s slightly less than one pound) without counting the cables, the weight of the exoskeleton gloves was unnoticeable during the demo, especially if the user keeps their hands close to their body. The HaptX Glove is worn over a thin cotton glove (some would argue that the cotton glove in this case is an endosuit – a peripheral between the user and the exoskeleton). Once on, the glove is tightened using a BOA closure system, similar to that of a ski boot. For this trial, the HaptX Glove fit very comfortably.

The HaptX Glove does three things simultaneously. First, it monitors and transmits the position of each finger and the hand. Second, it can exert pressure against the fingers (haptic feedback). Finally, it has a brake mechanism that can pull against the fingers to create the sensation of resistance against an object. To be fair, there are other motion tracking and force feedback gloves in development. What makes the HaptX special is that it can exert controlled amount of pressure at various points on the fingers and palm of the hand.
Each HaptX Glove contains up to 130 silicone channels with proportional valve technology designed by Festo. These channels terminate in thin bubbles that can be filled with air to expand and apply a force against the skin. The actuation is achieved using a small air compressor and a controller with the piezoelectric valves designed by Festo. Of special note is that the valves are not just open/closed, but can control the amount of air flowing through them, which in turn regulates how high the bubbles will rise. During the demo, this system created different levels of force feedback proportional to the grip strength of the Shadow Hand and the perceived force by the BioTac sensors.
One way to test the power of the proportional force feedback is to try and lift a stack of inverted plastic cups. The user can actually “feel” how tightly they are gripping the cup on top and can change their grip strength to raise just one, several or the entire stack. This is achieved using both visual cues and the proportional haptic feedback by the HaptX Glove.
It should not be a surprise that the Festo Experience Center features an exoskeleton glove. Since 2006, Festo has developed biomimetic devices inspired by both animal and human form and function. Festo has also worked on the ExoHand exoskeleton glove between 2010 and 2012.
“It is impressive that the whole system works together. What is possible has now changed.” says Rich Walker, Managing Director of the Shadow Robot Company. The Tactile Telerobot represents a coalition of aligned interests with Tangible Research focusing on the development of tele-robotics and actively collaborating with Shadow Robot Company and HaptX to build this system. From the point of view of All Nippon Airways as a sponsor, the merger of sensor, robotic and exoskeleton technology presents an opportunity for people to “travel” without the use of an airplane.
In addition to helping operators control robotic devices, the HaptX Glove has the potential of making virtual reality more realistic. We know what manipulating an object should look like, but our brain is also programmed to look for how manipulating an object “feels” like. Force-feedback exoskeletons could be very useful for virtual reality training or just for entertainment.
This article was originally published on Nov 27, on Forbes.com.








Add Comment