

WearRAcon19 continues in its second day in sunny Scottsdale Arizona with a breakfast sponsored by Levitate and the second keynote address by Robert Riener, professor Sensory-Motor Systems Lab ETH Zurich. Robert Riener focuses on rehabilitation engineering on is also the main force behind the highly successful Cybathlon competition in 2016.

Stroke is an ever-increasing medical problem, says Dr. Riener. Most of the time, as much as 90% of the time, adults are not mobile. Compared to children, adults move very little. After a stroke, thinking that people can re-learn all movements in one hour per day rehabilitation sessions is simply not very realistic. Exoskeletons can help provide the additional daily mobilization needed to improve the mobility for people recovering from partial paralysis due to stroke.
Devices and machines have been designed for all levels of immobilization, starting with a bed that tilts upwards and has an integrated step treadmill-like device which showed better results than FES. Heart pressure and effort can be controlled by a change in inclination. Half a dozen different fixed frame exoskeletons can be used for patients with greater ambulatory capability. Of course, participation by the user is critical.
The above leads to patient-cooperative robotic training with the motors and integrated sensors working together in fixed frame exoskeletons like the Lokomat. Combining these thoughts, the exoskeleton training integrates a projected virtual environment with changing scenery, sound and effects based on the user’s attendance and sensory input. Patient simulation is thus variably controlled at all time.

Should exoskeletons be rigid or soft? There is no clear winner at this time, some are better depending on the application (but the wheelchair is not going anywhere in the next 50 years). Rigid exoskeletons can be large and bulky with much weight added, but soft exosuits transfer forces on the bones and joints of the user.
The goal, however, is always the same, a couple of steps in front of a store door or a high shelf at a supermarket has to be overcome by a wheelchair user. One way to optimize an exoskeleton is to decide what it is designed to do first. For example, running vs standing up requires a different set of muscles to be augmented, resulting in a physically different device. Another example of the application controlling the design is placing of the motors, controllers, and batteries. If slow walking is the goal, heavy components can be left in the lower leg to avoid a backpack but this would be impossible if the goal was a running augmentation wearable.
Another new development is telemetric crutches, crutches that have built-in tilt and pressure sensors that feed additional medical information regarding the walking performance of the user. Dr. Riener’s efforts extend beyond the lab. Myoswiss is a spin-off company that is the result of the lab’s effort with 10 prototypes in testing. The next Cybathlon will be hosted in 2020 with 80 of the 100 slots already filled.
A Day for Innovation
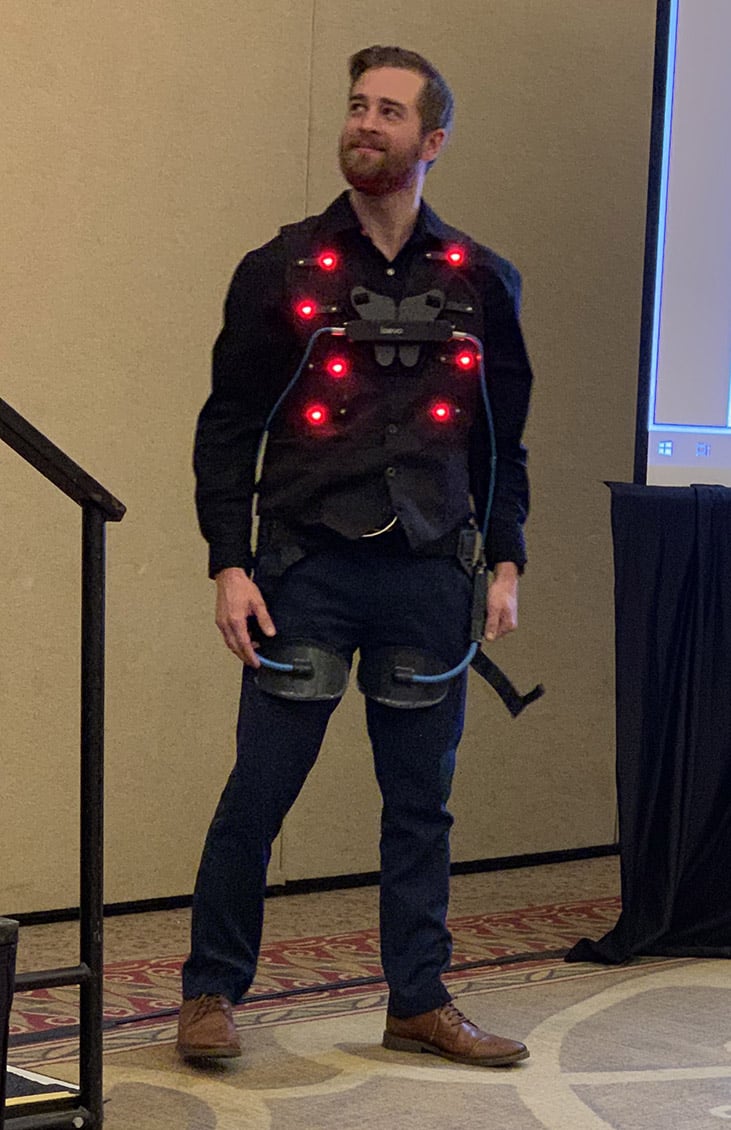
As usual, the remainder of the day was filled with networking opportunities at the main stage, and access to almost a dozen exoskeletons than attendees could try out. Available wearable systems included a chairless-chair, power gloves, a powered knee exo, back support wearables, and shoulder support exoskeletons. In addition, there were multiple booths dedicated to motors and sensors.

WearRAcon19 also included the Innovation Challenge. Student teams and small companies had five minutes each on the main stage to highlight a problem that they would like to address and their solution for it. This year there was a wider variety of ideas such as an upper body weight training device with no spring-back or free weights and the concept for an exosuit for dogs that can extend the quality of life for aging pets. As usual, the 2019 Innovation Challenge will be covered in a separate article.
The second day of WearRAcon19 also included eight breakout sessions with multiple presenters in each divided into a medical and industrial track. In addition to the material presented, the questions and answer sessions always had the potential to go into new and unexplored areas. While a technology conference, wearable technology is about assisting or augmenting the user. Discussion arose on topics like privacy (collection of data from onboard sensors) and increasing demand on employees (if an exoskeleton can make a task be performed faster and safer, could the workplace require the task be performed faster).
Below is a small taste from a handful of the breakout sessions:
Quantifying the benefit with and without working exoskeletons. – Exoskeletons as a disruptive technology.

Jason Gillette, Iowa State University Department of Kinesiology and Terry Butler, Lean Steps Consulting led a delightful (if you are into workplace metrics) session on ergonomic assessments for an upper-body exoskeleton using electromyography (EMG) and a camera-based system. Delays Trigno EMG system are compact, wire-free sensors that were instrumental in being able to acquire EMG data in a real industrial environment. As a side note, wireless mobile sensors are the unsung heroes of the exoskeleton industry.
Professor Gillette evaluated workplace tasks with and without the shoulder support exoskeleton (the majority of the testing was performed with the Levitate Airframe). Low and high-frequency EMG noise was filtered. Sometimes, the noise would come from the work environment such as a welder working on a car production line.
The EMG signal for a task can then be compared to the muscle capacity to create a fatigue risk value, the higher the value, the higher the fatigue and risk of injury. This way, different tasks on the manufacturing line can be quantified in terms of risk for injury. Having the metrics in place opens the door to evaluate tasks with and without a shoulder support exoskeleton. The Iowa State team looked at a total of 10 car manufacturing tasks from painting to welding. The tests data was collected in 10-minute intervals.
At John Deere, with a sample of n=6, there was a visible drop in fatigue risk value. Curiously, there were some improvements in tasks that were already below the risk value which serves as a reminder that wearables not only have to solve a problem but solve the right problem. Out of the six different tasks, there was a decrease in fatigue risk value in 5 out of 6 tasks, but fender assembly, surprisingly, had poor results. What could have happened? In a post-survey, it was discovered that one of the straps had come loose, which was most likely the cause for the increase in total muscle activation signal measured. The research suggests that there appears to be a differentiator in overhead tasks: overhead, overhead but lower, overhead with a push, overhead with a sliding motion etc…
Translating from car manufacturing to construction:
Installing 300,000 sprinkler heads in a new building can be surprisingly similar to the task cycle time and motion to working overhead in a car manufacturing plant. Again, data must first be collected to determine if the task constitutes a fatigue and injury risk as performed. ACGIH has created and published an Upper Limb Localized Fatigue Curve of the exertion vs time spent in that position during a work cycle. Visual (camera) systems can be used to quantify the ergonomic risk of the task. Furthermore, the ergonomic risk factor will have some variance from person to person that ideally should also be measured and quantified. The end goal would be to create a go-no-go type of test to determine if a work task is an ergonomic risk. Then, an administrative control or an engineering change should be considered first. If neither is possible, a PPE (personal protective equipment) should be implemented, and lightweight shoulder exoskeletons can qualify.
GoX Studios – The internet of things for people
We live in a connected environment, so should people be measured? Exoskeleton technologies built-in sensors can be used to measure and connect people. The first obstacle is privacy. Is this “Big Brother” or a faceless corporation watching and punishing? Data anonymity is a way to counteract this fear as is limiting access to the data.
Wearable sensor technology can track ergonomic positions. For example, a bad lift could result in vibration, a sound or even blinking lights to remind the user that they are putting themselves at risk. The exoskeletons can be stand-alone, or even passive wearables can have integrated motion sensors. “Everything is connected and it is time to connect people.”
Join us next time as we cover the excitement on the main stage and the third and last day of WearRAcon19!







Add Comment