
The Japanese Industrial Standards (JIS) has published JIS B 8456-1 designed to prescribe safety performance and labeling criteria for lumbar support wearable robots. This is the first such standard published in the world!
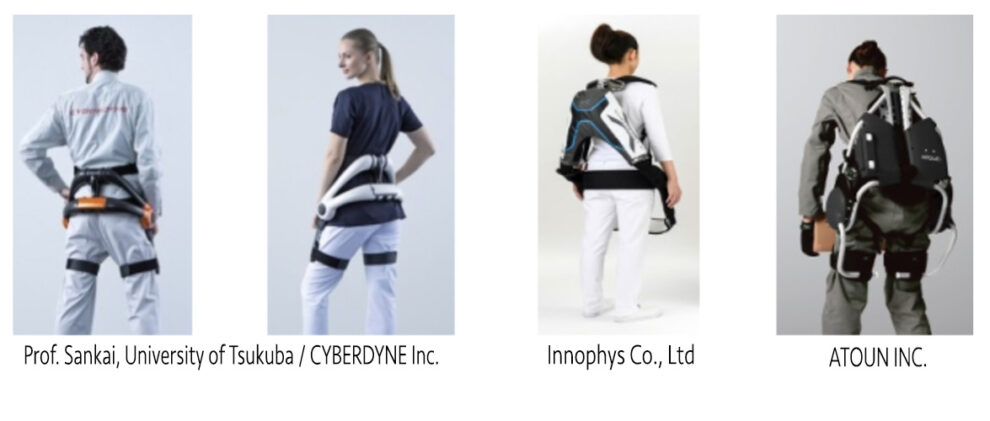
CYBERDYNE spearheaded the efforts as a project leader. The main focus of JIS B 8456-1 is on hip exoskeletons for work and industry developed in Japan:
- CYBERDYNE’s HAL Lumbar Type for Labor/Care
- HAL Lumbar Type to Promote Independence (tentative name)
- Innophys’ Hip Auxiliary Muscle Suit
- Atoun’s (formally ActiveLink – Panasonic) AWN-03
JIS B 8456-1 establishes guidelines for exoskeleton designers that have to be met for products to be certified by the JIS marks and labels. The guidelines fall mainly in quantifying the amount of assistive force while lifting, while lifting and maintaining posture, while lowering, and quantifying the reduction in lumbar compression.
CYBERDYNE’s Motivation:
In a video from October of last year (above), CYBERDYNE’s founder, Dr. Sankai described the importance of standards for his exoskeleton company:
“If someone creates innovative technologies, in this case, there is no market, there are no users, no social rules, and no professionals. But if we can have the ISO standard, it is easier to design suitable devices.”
One year ago, Dr. Sankai was referring to safety standards, and now his team’s work has expanded into testing standards.
Test Strategy:
 One unique aspect of JIS B 8456-1 is the creation of a test dummy for the evaluation of the various hip exoskeletons. The dummy system replaces the variability of the human user for some of the testing. The user’s size, familiarity with the device, fit, physical and mental condition can all introduce uncontrolled variables in the testing of a wearable device. Creating a test dummy is a viable strategy for reducing this variability.
One unique aspect of JIS B 8456-1 is the creation of a test dummy for the evaluation of the various hip exoskeletons. The dummy system replaces the variability of the human user for some of the testing. The user’s size, familiarity with the device, fit, physical and mental condition can all introduce uncontrolled variables in the testing of a wearable device. Creating a test dummy is a viable strategy for reducing this variability.
In the past, various exoskeleton manufacturers have expressed reservations towards using mechanical dummies for exoskeleton evaluation. The publication of this standard highlights the importance for developers, manufacturers, and end users to be involved in the creation of industry standards.
Getting involved with exoskeleton standards:
- You can join free (for now) the ASTM Committee F48 on Exoskeletons and Exosuits: https://www.astm.org/COMMITTEE/F48.htm (The NIST Terminology Task Force is now part of F48)
- ISO/TC 299 Work Group 2 https://www.iso.org/committee/5915511.html
- WearRA Standards & Education Committee: http://www.ieee-ras.org/industry-government/standards/wearable-robotics-standard
- IEEE-RAS Technical Committee on Wearable Robotics: http://www.ieee-ras.org/wearable-robotics
Future Work:
The CYBERDYNE team has proposed the performance test of JIS B 8456-1 to ISO/TC 299/WG 4 towards international standardization. This can potentially expand the scope of the current standard outside of Japan.
Update March 19, 2018
The “Standard Performance Test of Wearable Robots for Lumbar Support” has been published in the IEEE Robotics and Automation Letters (RA-L). http://ieeexplore.ieee.org/document/8304776/
The officially listed authors are:
Cota Nabeshima – Cyberdyne
Ko Ayusawa – Intelligence System Research Institute, AIST
Conrad Hochberg – Cyberdyne
Eiichi Yoshida – CNRS-AIST JRL (Joint Robotics Laboratory)
Links & Sources:
The world’s first product standard for wearable robots for lumbar support “JIS B 8456-1” was established, Press Release, Oct 20th, 2017, CYBERDYNE, https://www.cyberdyne.jp/english/company/PressReleases_detail.html?id=6367
Report, Ministry of Economy, Trade, and Industry (Japan), (both links are in Japanese)
http://www.meti.go.jp/press/2017/10/20171020004/20171020004-2.pdf
http://www.meti.go.jp/press/2017/10/20171020004/20171020004.html






I s it possible to be a subject to be used in research?raydeluca@optonline.net I had hemi pelvectomy right side NO ILIUM MUSCLE etc.