

Frontiers in Neuroscience have published an original research article: Design and Preliminary Feasibility Study of a Soft Robotic Glove for Hand Function Assistance in Stroke Survivors. The article was written by Hong Kai Yap, Jeon Hoon Lim, Fatima Nasrallah, and Chen-Hua Yeow. All of the authors hail from Singapore or Australia.
The article discusses advantages and advances in fabric-reinforced soft pneumatic actuators for the construction of a power glove. The soft robotic glove was designed for grasping assistance for activities of daily living of stroke survivors. The article was published in Oct 2017 and it can be viewed in its entirety free of charge at Frontiers Media SA.

If the name of one of the article authors sounds familiar to you, it might be from WearRAcon17. Hong Kai Yap, Department of Biomedical Engineering, National University of Singapore, presented the Fabric-Based Assistive Glove for Hand Impaired Patients at the WearRAcon17 Innovation Challenge.
Design requirements:
The design requirements of the soft robotic glove is one of the sections that jumps right out of the research article. The main emphasis is on comfort, achieved by:
- reduction in the weight
- easier alignment of the pneumatic actuators compared to cable driven systems
- expansion of the air chamber that matches and limits shear forces at the finger interface
Only after these design considerations were met was the soft robot glove evaluated using test fixtures and user experiments for efficacy. The power glove had to provide enough grasping force to securely hold objects that would be encountered during everyday life.
The design requirements in this paper show how much the exoskeleton industry has matured. It is no longer in doubt that robotic gloves can be useful. Now the focus is shifting to making the soft robotic glove light and comfortable enough to the point where it can be worn and utilized for multiple hours of the day, every day.
Where does the Soft Robotic Glove fit into the equation?
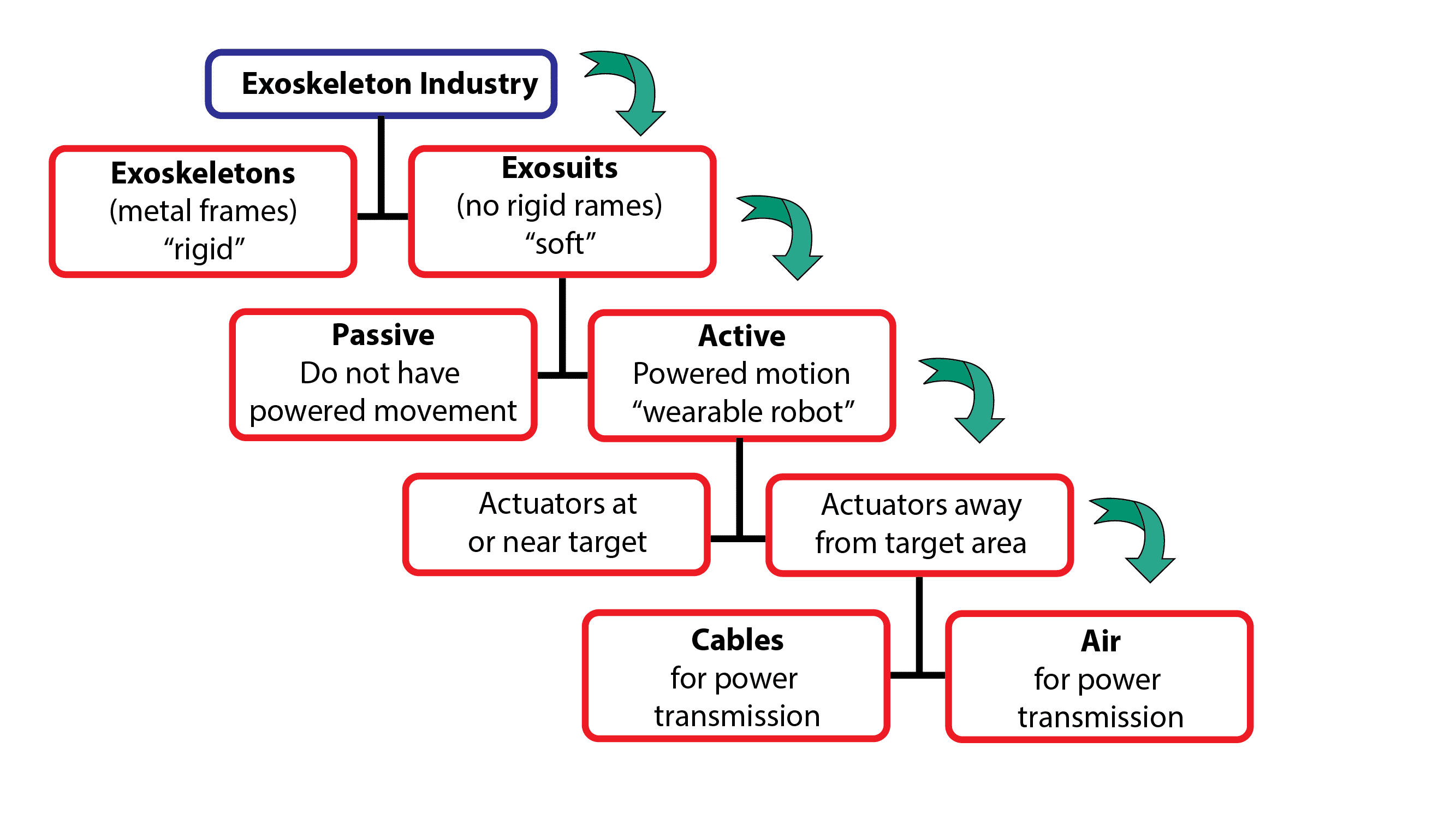 Many developers of exoskeleton devices that lack a rigid metal frame prefer to use “exosuits” over “exoskeletons.” The vast majority of exosuits are active, meaning they have some combination of a power source, actuators and sensors, much like a robot. Usually, but not always, exosuits have their batteries, controllers and driving mechanism away from the targeted joint, with the force being transmitted to the desired body area. This research paper is about a Soft Robotic Glove – in other words, it is a type of exoskeleton that has no rigid metal frame and is made of soft, bendable materials. It is powered and controlled by a controller much like a robotic device, and is worn on a person like a glove.
Many developers of exoskeleton devices that lack a rigid metal frame prefer to use “exosuits” over “exoskeletons.” The vast majority of exosuits are active, meaning they have some combination of a power source, actuators and sensors, much like a robot. Usually, but not always, exosuits have their batteries, controllers and driving mechanism away from the targeted joint, with the force being transmitted to the desired body area. This research paper is about a Soft Robotic Glove – in other words, it is a type of exoskeleton that has no rigid metal frame and is made of soft, bendable materials. It is powered and controlled by a controller much like a robotic device, and is worn on a person like a glove.
Conclusion:
![Figure 1. (A) A fabric-reinforced soft actuators with a corrugated fabric layer and an elastic fabric later [Actuator thickness, T = 12 mm, and length, L = 160 mm (Thumb), 170 mm (Little Finger), 180 mm (Index & Ring Fingers), 185 mm (Middle Finger)]. (B) Upon air pressurization, the corrugated fabric layer unfolds and expands due to the inflation of the embedded pneumatic chamber. Radial budging is constrained when the corrugated fabric layer unfolds fully. The elastic fabric elongates during air pressurization and stores elastic energy. The actuator achieves bending and extending motions at the same time. (C) A bending motion is preferred at the finger joints (II, IV, VI). An extending motion is preferred over the bending motion at the finger segments (I, III, V) and the opisthenar (VII).](https://exoskeletonreport.com/wp-content/uploads/2017/11/fnins-11-00547-g001.jpg)
Sources:
Design and Preliminary Feasibility Study of a Soft Robotic Glove for Hand Function Assistance in Stroke Survivors, Hong Kai Yap1,2 Jeong Hoon Lim3 Fatima Nasrallah4 and Chen-Hua Yeow1*Front. Neurosci., 09 October 2017 | https://doi.org/10.3389/fnins.2017.00547
- 1Department of Biomedical Engineering, National University of Singapore, Singapore, Singapore
- 2NUS Graduate School for Integrative Sciences and Engineering, National University of Singapore, Singapore, Singapore
- 3Department of Medicine, National University of Singapore, Singapore, Singapore
- 4Queensland Brain Institute, University of Queensland, St. Lucia, QLD, Australia







Add Comment