

Student-built wearable robotics projects are often where the “why” of exoskeletons becomes easiest to see: curiosity, constraints, rapid iteration, and a practical desire to make humans more capable. Lucas Gombert, a 12th-grade student at Centennial High School, has spent the last two years developing an exoskeleton concept called ARX (Augmentative Research Exoskeleton). ARX is a wearable device intended to explore strength augmentation, EMG (electromyography)-based control, and, eventually, an augmented-vision feature using a thermal camera overlay.
This article highlights a bright mind and gives all of us a glimpse into how the next generation perceives exoskeleton technology. Below is a Q&A-style write-up built directly from Lucas’s responses in our email exchange:
Bobby (Exoskeleton Report): Can you introduce yourself and your project to the readers?
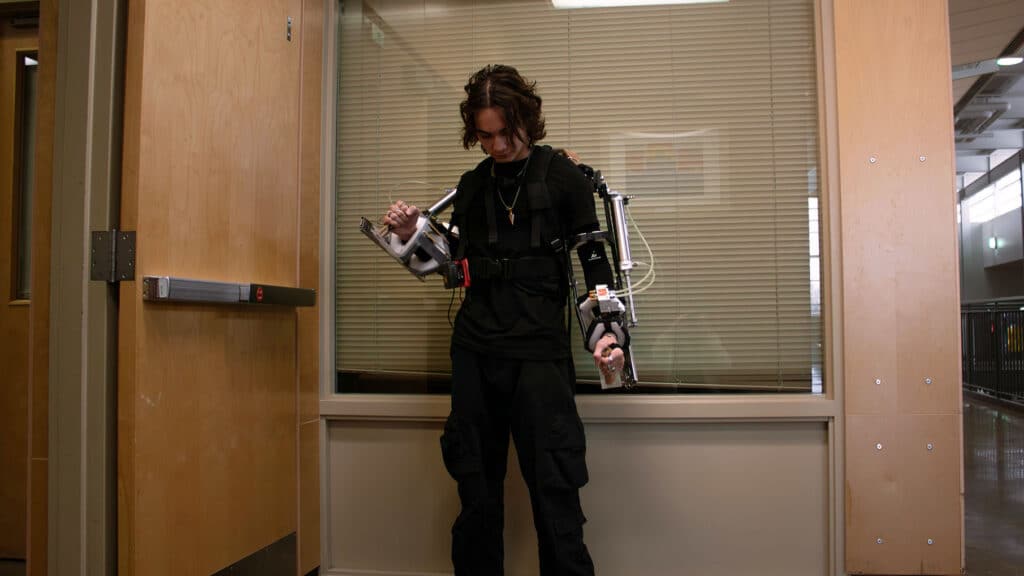
Lucas (Lolbis Engineering): My name is Lucas Gombert, and I’m a Grade 12 student at Centennial High School. I’ve been working on a suit nicknamed the ARX (augmentative research exoskeleton) for the past two years. The goal is for it to become a kind of test bench for understanding augmentation, its benefits and drawbacks, and how it can affect things like proprioception, kinesthetic understanding, and perceptual continuity.
Bobby: Where did your interest in wearable robotics start?
Lucas: Ever since I was young, I have been interested in wearable robotics and mechanical augmentation. I built my first prosthetic at age 9, and my first single-arm exoskeleton at 10, both out of Lego. Ever since then, I’ve been infatuated with the idea of increasing what you’re currently capable of doing to greater heights using technology.
Bobby: Where do you see this technology having the potential to do the most good?
Lucas: Wearable technology and augmentation are an extremely optimistic field of engineering that I see having an infinite number of applications. From industrial assistance, to increasingly advanced and natural prosthetics and even military uses, I see no cap to the potential of this branch of engineering. Personally, I believe that care for individuals who have difficulties moving (such as the elderly) will receive the greatest benefit from this advancing technology, as it will allow for them to retain active lifestyles despite limited mobility.
@lolbisengineering much more to come sorry for the year long hiatus 😭🙏 #arduino #exoskeleton #robotics #prosthetics #engineering ♬ original sound – Top5 Rank
Bobby: Why did you go with the pistons rather than servo motors?
Lucas: For my project, I went with pneumatic cylinders instead of servos for the main actuators of the exoskeleton. The reasoning behind this was simple, pneumatics is a lot cheaper than servos. During the initial phases of this project, I was in grade 10, only being 15 at the time and having an extremely limited budget forced the use of pneumatics. However, despite their drawbacks, pneumatics is extremely strong and can pull an incredible amount of weight which influenced how I developed this suit as time went on.
Bobby: Are you working by yourself? Who are your mentors?
Lucas: For most of this project, I have worked alone up until the start of grade 12, when it became my main project for my engineering class. Since then, I have been working with my partner, Paul Fraiser, to further develop the suit. Additionally, my engineering teacher and greatest mentor, Justin Mah, has guided and assisted me over the past 2 years and is a core reason this project was even deemed feasible for me.
Bobby: Who is sponsoring your project? Where do you get access to tools?
Lucas: My access to tools and resources is a major hurdle that this project must continuously overcome in order for it to progress. Thankfully, my engineering class has provided many tools for me to pursue this project, and what they didn’t have, I purchased for myself over time.
@lolbisengineering exoskeleton power test #engineering #prosthetics #robotics #exoskeleton #arduino ♬ original sound – Lolbis Engineering
Bobby: How are your classmates reacting to your project?
Lucas: My classmates (some of which I’ve been with since grade 10) have all been extremely supportive and helpful, providing ideas and finding flaws in my designs which I’ve been able to polish.
ARX is an early-stage student project, and the concepts Lucas described: EMG control, pneumatic actuation, and AR/thermal overlays – span multiple complex engineering and human-factors domains. We’re sharing this as an example of grassroots innovation and iteration under real-world constraints (budget, tools, time). You can follow the project’s progress on TikTok: @lolbisengineering
All photos credited to @coulter.cr2
ARX vs. EduExo Pro
Some of you may have noticed the similarities between Lucas’ ARX and Auxivo’s EduExo Pro. That’s a great example of design convergence: when different builders arrive at similar architecture because the problem (human–robot coupling, joint alignment, intent detection, usable torque paths) pushes designs toward familiar solutions. The key differences are equally significant: EduExo Pro is a standardized elbow–shoulder educational kit with a passive shoulder and electrically powered elbow, while ARX is a student-built project (intended to be a full-body suit) that uses pneumatic cylinders and is being developed as a personal test bench for EMG-driven augmentation and future AR/thermal-vision experiments.
Special thanks to Lucas for taking the time to answer all of my questions, and on behalf of the entire exoskeleton community, I wish him luck and to stay safe in all future engineering endeavors.






Add Comment